11
9.4 Sécurité intégrée (failsafe) avec retour au point de décollage (Coming Home)
Les exigences suivantes doivent être satisfaites pour le fonctionnement de la sécurité intégrée en mode retour au point de
décollage (coming home):
t-FNPEÒMFTFUSPVWFFONPEFEFWPMOPSNBMFUMhBDDVEhBMJNFOUBUJPOEVNPUFVSFTUDIBSHÏ
t-FNPEÒMFBUSPVWÏVOTJHOBM(14TBUJTGBJTBOUTBUFMMJUFTPVQMVTMBEJPEFEhÏUBUESPJUFDMJHOPUF
clignote
®/05&3
t1PVSBTTVSFSVOGPODUJPOOFNFOUTßSEVNPEÒMFBTTVSF[WPVTRVFMFNPEÒMFBTBVWFHBSEÏTBQPTJUJPOEFEÏDPMMBHFFURVF
vous identifiez cette position avec précision (position du modèle lors de l'établissement du lien).
t-PSTRVFMBTÏDVSJUÏJOUÏHSÏFCBTÏFTVSMFNPEF$PNJOH)PNFBÏUÏMBODÏFMFNPEÒMFWPMFFOUSBOTMBUJPOMPOHJUVEJOBMFWFST
l'avant, parallèlement à l'horizon jusqu'à son point de départ.
t4JEFHSPTPCTUBDMFTTFUSPVWFOUTVSTPODIFNJOMFNPEÒMFSJTRVFEhFOUSFSFODPMMJTJPOBWFDFVY
t&OQSÏTFODFEhVONBVWBJTTJHOBM(14PVFOMhBCTFODFEFTJHOBM(14MFNPEÒMFOhFTUQBTFONFTVSFEhFYÏDVUFSMBTÏDVSJUÏ
intégrée avec le mode Coming Home et ne revient donc pas à son point de départ.
9.5 Protection à minimum de tension
La protection à minimum de tension sert d'avertissement lorsque la charge de l'accu s'affaiblit. Lorsque l'accu d'alimentation du
moteur est vide, la diode d'état verte gauche commence à clignoter lentement et le modèle passe en vol descensionnel lent.
ATTENTION :
lorsque cet avertissement est signalé par la diode, atterrissez votre modèle le plus vite possible pour éviter une chute.
Notice de mise en œuvre du multicoptère QR X350 Pro FPV RTF réf. WK2200
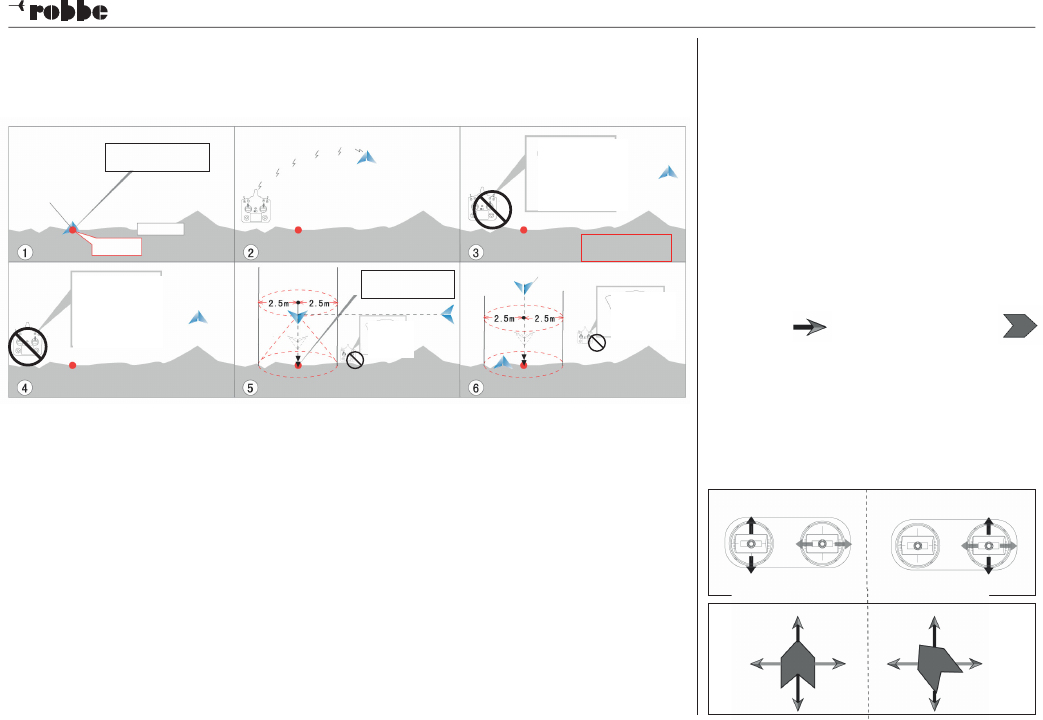
Position de départ
Relevé de la position
de départ
Prêt pour le
retour
Origine possible
Voler
secteur d'atterrissage
possible
Position de départ
relevée
Erreur
de
signal
Vol stationnaire
Erreur de
signal
Sol
Modèle
Erreur de
signal
Lancer Coming
Home
D'abord vol stationnaire, puis atterrissage
Erreur de
signal
Mode 1, gaz à droite mode 2, gaz à gauche
Manche de tangage
Manche du roulis
Manche du tangage/roulis
Comportement en vol normal Comportement dans le mode IOC
9.6 Commande intelligente de l'orientation (Intelligent Orien-
tation Control - IOC)
t -F NPEÒMF TF USPVWF FO NPEF EF WPM OPSNBM FU MhBDDV
d'alimentation du moteur est chargé.
t "TTVSF[WPVT RVF WPVT NBÔUSJTF[ MFT DPOOBJTTBODFT EF
base du vol avant d'aborder cette fonction. Dans ce mode
il est possible de faire voler le modèle toujours dans la di-
rection de la position de décollage en tirant sur le manche
de tangage.
Dans ce mode „l'avant du modèle“ se trouve toujours „à
l'avant dans le sens du vol“. Cela signifie que, quelle que soit
la position instantanée du modèle, en poussant le manche
de tangage vers l'avant, le modèle s'éloigne de son point
de départ et lorsque vous tirez le manche de tangage vers
l'arrière, le modèle s'efforce de voler dans la direction de son
point de départ.
Explication des schémas :
Direction du vol direction du „nez du modèle“
Normalement, la direction du vol „vers l'avant“ sur un modèle
réduit est cette vers laquelle le nez du modèle est pointé.
Dans le mode IOC, peu importe dans quelle direction est ori-
enté le nez du modèle. Dans ce mode de vol, „l'avant“ est tou-
jours la direction dans laquelle pointait lors de l'identification
du point de décollage. De ce point de vue, observez les illus-
trations suivantes (les flèches sur l'ensemble de radiocom-
mande correspondent ici aux mouvement en tangage et en
roulis).