2 GHP12InstallationInstructions
Product Registration .................................................................... 1
Contacting Garmin....................................................................... 1
Important Safety Information ....................................................... 1
Main Components ....................................................................... 3
CCU ...................................................................................................3
ECU ...................................................................................................3
GHC 10 ..............................................................................................3
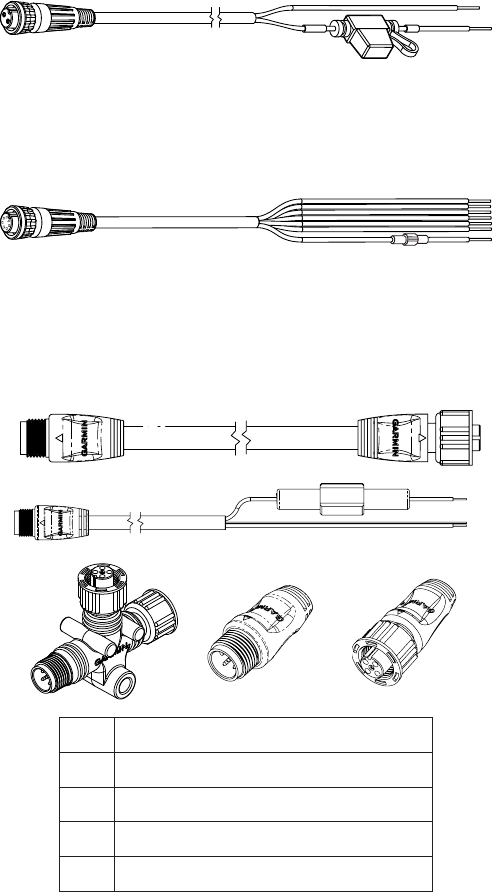
Cables and Connectors ............................................................... 3
CCU/ECU Interconnect Cable ...........................................................3
Alarm..................................................................................................3
ECU Power Cable ..............................................................................4
GHC 10 NMEA 0183 Data Cable .......................................................4
NMEA 2000 Cables and Connectors .................................................4
Tools Needed............................................................................... 4
Mounting and Connection Considerations................................... 5
Dive Unit Mounting and Wiring Considerations .................................5
ECU Mounting and Wiring Considerations ........................................5
CCU Mounting Considerations ..........................................................5
CCU Wiring Considerations ...............................................................5
Alarm Mounting and Wiring Considerations ......................................5
NMEA 2000 Wiring Considerations ...................................................5
GHC 10 Mounting Considerations .....................................................5
GHC 10 Wiring Considerations ..........................................................5
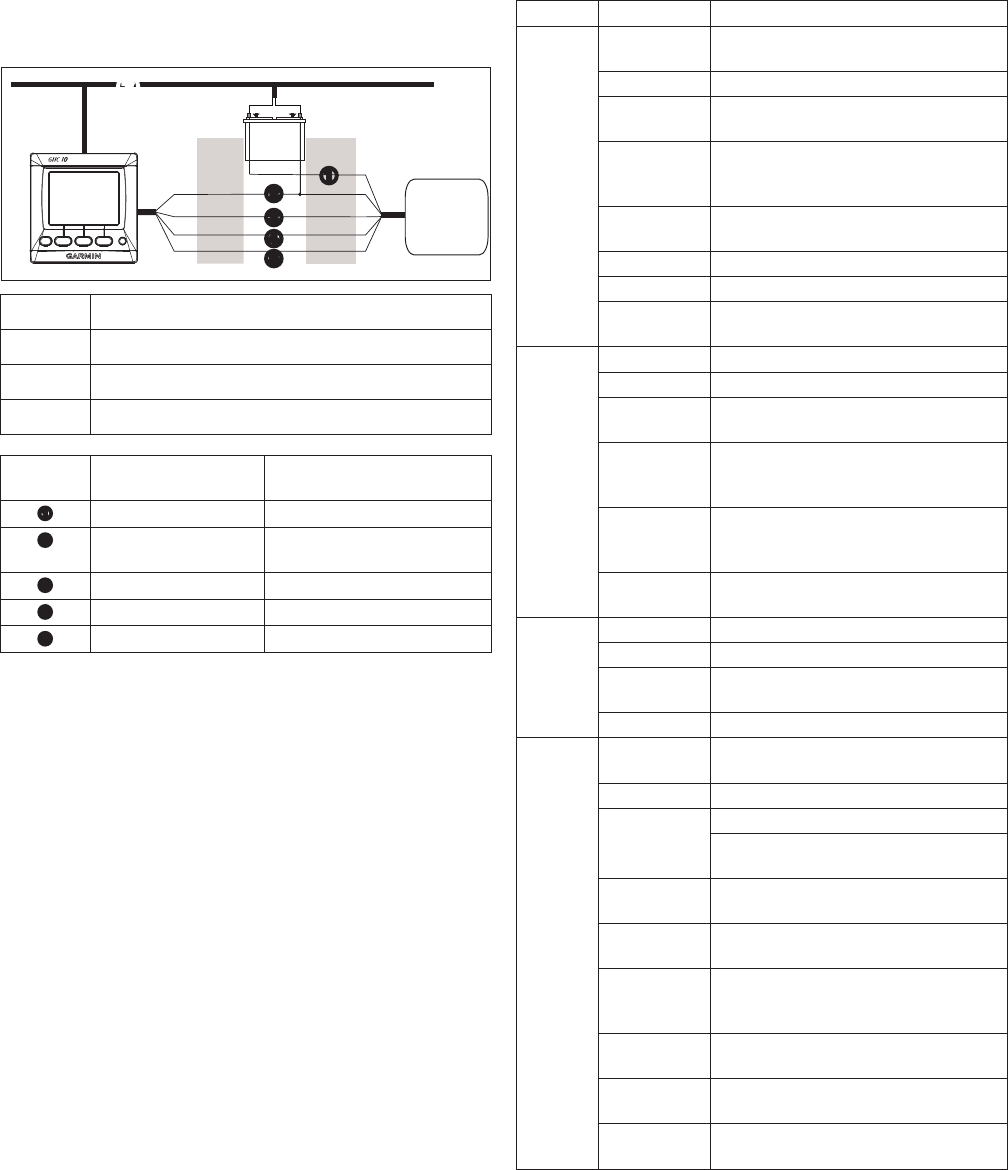
General Connections Diagram .................................................... 6
General Component Layout Diagram .......................................... 7
Drive Unit Installation................................................................... 8
Installing a Garmin Dive Unit .............................................................8
Preparing a non-Garmin Dive Unit .....................................................8
ECU Installation ........................................................................... 8
Mounting the ECU .............................................................................8
Connecting the Dive Unit to the ECU ................................................8
Connecting the ECU to Power ...........................................................8
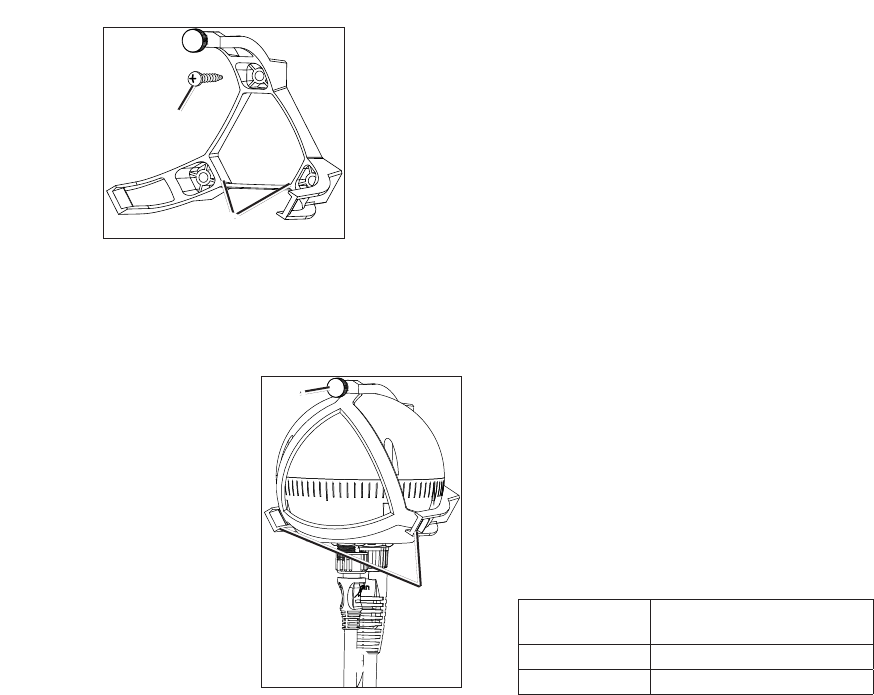
CCU Installation........................................................................... 9
Installing the CCU Mounting Bracket .................................................9
Connecting the CCU ..........................................................................9
Alarm Installation ......................................................................... 9
Mounting the Alarm ............................................................................9
Connecting the Alarm ........................................................................9
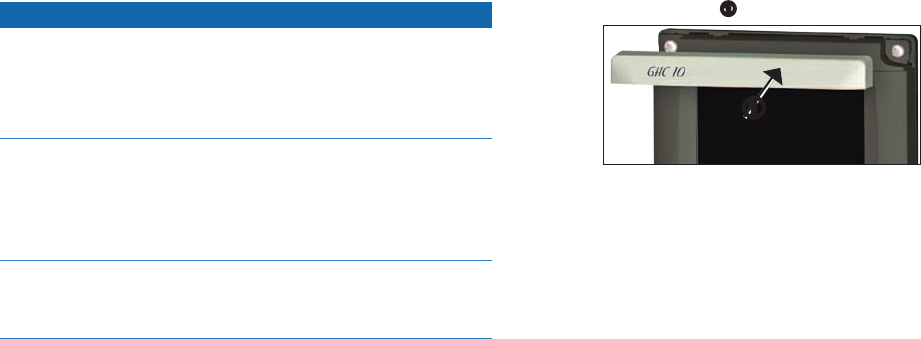
GHC 10 Installation ................................................................... 10
Mounting the GHC 10 ......................................................................10
Connecting the GHC 10 ...................................................................10
Multiple GHC 10 Considerations .....................................................10
Connecting the Devices to a NMEA 2000 Network ................... 11
Building a Basic NMEA 2000 Network for the GHC 10 and the
CCU ...........................................................................................12
Connecting Optional Devices to the GHP 12 Autopilot System . 12
Connecting an Optional NMEA 2000-compatible Device to the
GHP 12.......................................................................................12
NMEA 0183 Connection Considerations .........................................12
Connecting an Optional NMEA 0183-compatible Device to the
GHC 10 ......................................................................................12
Dockside Wizard........................................................................ 13
Performing the Dockside Wizard ............................................... 13
Starting the Dockside Wizard ..........................................................13
Selecting the Drive Unit Class .........................................................13
Selecting the Drive Unit Voltage ......................................................13
Selecting the Clutch Voltage ............................................................13
Calibrating the Rudder .....................................................................13
Tuning a Non-Garmin Drive Unit ......................................................13
Testing the Steering Direction ..........................................................13
Reviewing the Results of the Dockside Wizard ...............................14
Sea Trial Wizard ........................................................................ 14
Important Sea Trial Wizard Considerations ............................... 14
Performing the Sea Trial Wizard................................................ 14
Starting the Sea Trial Wizard ...........................................................14
Calibrating the Compass .................................................................14
Performing the Autotune Procedure ................................................14
Setting North ....................................................................................14
Evaluating the Results of the Autopilot Conguration................ 15
Testing and Adjusting the Autopilot Conguration ............................15
Advanced Conguration Power-on Procedure .......................... 16
Executing and Testing the Advanced Conguration Power-on
Procedure ...................................................................................16
Advanced Conguration Settings .............................................. 16
Manually Running the Automated Conguration Procedures ..........16
Manually Dening Individual Conguration Settings ........................16
Manually Adjusting the Settings for a Non-Garmin Drive Unit .........16
Performing Advanced Tuning Procedures for Non-Garmin Drive
Units ...........................................................................................16
NMEA 0183 Wiring Diagrams .................................................... 18
Specications ............................................................................ 19
NMEA 2000 PGN Information.................................................... 20
CCU .................................................................................................20
GHC 10 ............................................................................................20
NMEA 0183 Information ............................................................ 20
GHP 12 Conguration Settings ................................................. 21
Error and Warning Messages .................................................... 22
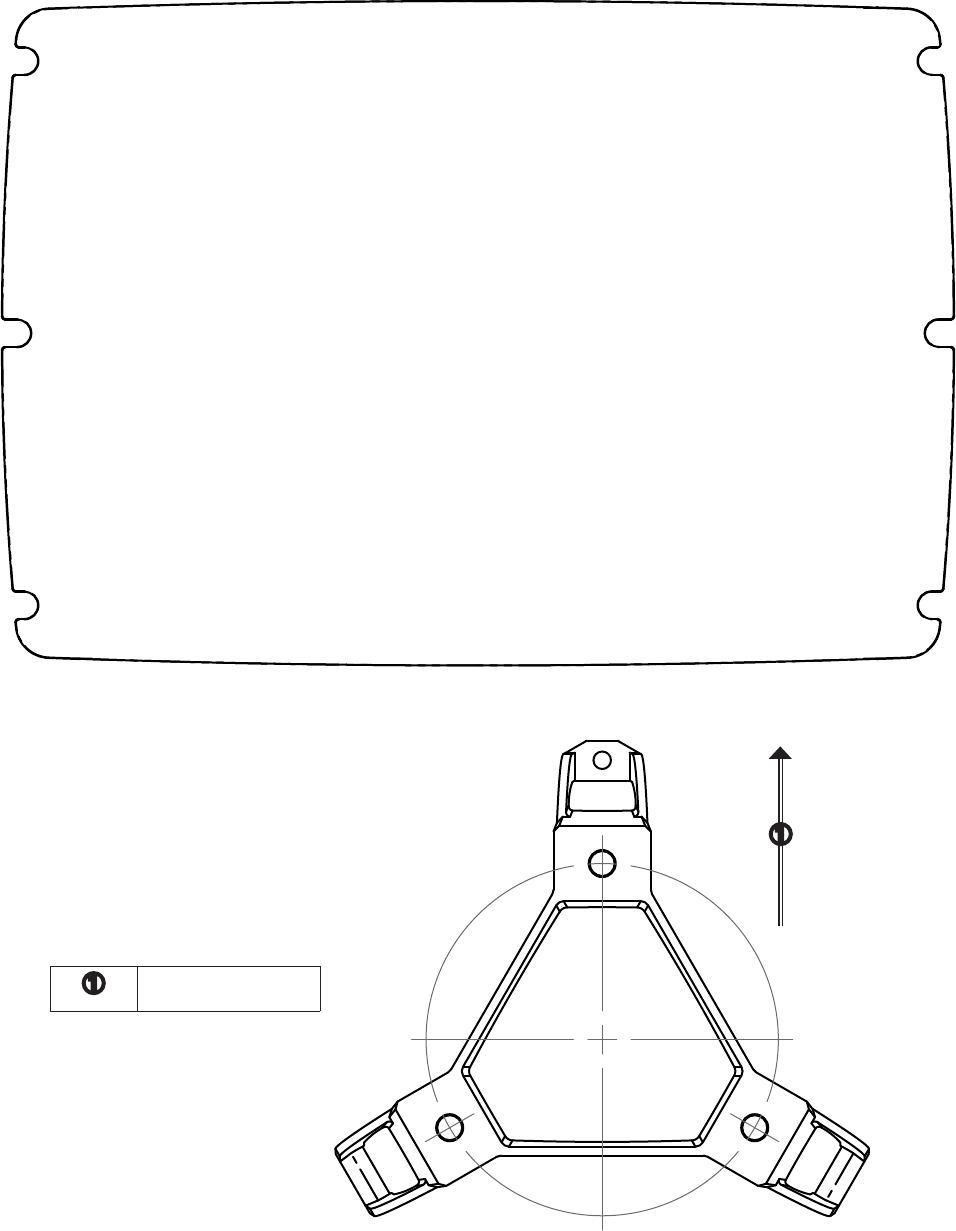
Mounting Templates .................................................................. 25
ECU Mounting Template ..................................................................25
CCU Mounting Template ..................................................................25
GHP 12 Installation Checklist .................................................... 27