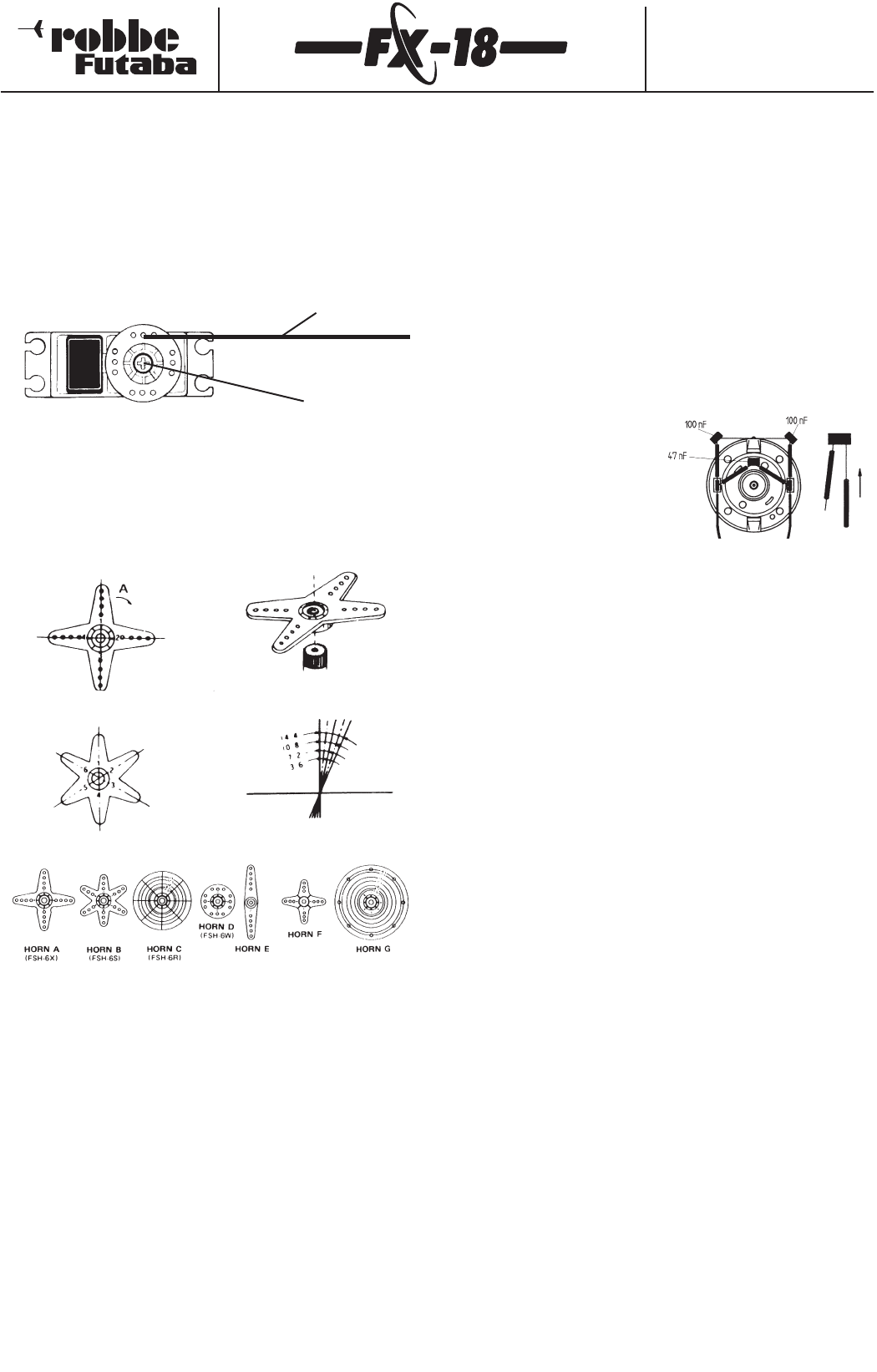
Servo output arms
Servos with splined output shafts permit mechanical adjustment of
the servo neutral position.The position is adjusted by undoing the
retaining screw and lifting off the output device.
Position the output device in the appropriate neutral position,push
it down onto the splines,and tighten the retaining screw again.The
following diagram shows a servo with pushrod connected.
A range of servo output arms is available for robbe servos,and they
are illustrated in the picture below. The picture also shows the
angular change per spline segment.
Installing linkages
The basic rule when installing mechanical linkages and control
surfaces is that they must be extremely free-moving,otherwise the
servos will draw excessive currents, and the effective operating
time per battery charge will be greatly reduced. At the same time
the centring accuracy of the control system will be worse, which in
turn has a negative influence on the model’s flying characteristics.
13.Using the system
All robbe-Futaba receivers continue to work with full range at
reduced voltage, down to the point where the supply voltage falls
to 3 V.The advantage of this is that normally the receiving system
will continue to work even if one cell fails completely (short-circuit),
as robbe-Futaba servos still work down to 3.6V, albeit at slightly
lower speed and with less power. This is very important in Winter,
when ambient temperatures are very low, otherwise any
momentary voltage collapse could cause the loss of a model.
However,there is a drawback:under certain circumstances the user
may not even notice the failure of a battery cell. For this reason it is
important to check the receiver battery from time to time. We
especially recommend the use of a robbe battery controller (No.
8248) or a robbe 10-LED switch harness (e.g.Order No. F 1404).
Power-on sequence
Always switch on the transmitter first, and only then the
receiver.
Reverse the sequence when switching off.
When you switch the receiver on, the servos run to the neutral
position. We recommend that you check each function in turn by
operating the associated stick or other transmitter control. Check
that each control surface functions in the correct "sense"
(direction).If any control surface moves in the wrong direction,that
servo must be reversed at the transmitter.
"Noise" interference
If your radio control system is to operate safely and reliably, it is
essential to avoid what is known as electrical "noise" interference.
This problem is due to metal parts, such as pushrods, rubbing
against each other intermittently as a result of vibration. For this
reason the linkage to the engine’s carburettor must always
terminate in a plastic clevis - never connect a metal linkage directly
to the carburettor arm without insulation.
Electric motors
All electric motors in RC models
must be effectively suppressed,
otherwise the sparks which are
generated between the
armature and the carbon
brushes when the motor is
running will have a serious
adverse effect on the radio
control system,and cause interference.
We recommend robbe suppressor filters, No.8306, 8307 or a set of
suppressor capacitors, No. 4008. Each electric motor in the model
must be suppressed individually as shown in the diagram.
Electronic ignition systems
The ignition systems of spark-ignition petrol engines can also
produce interference, which has an adverse effect on the radio
control system. Never power an ignition system from the receiver
battery; a separate battery is essential.
Be sure to use properly suppressed spark plugs, plug caps and
shielded ignition cables.
Keep the receiving system as far away as possible from any ignition
system.
Receiver battery capacity and operating times
This rule applies to all types of battery:at low temperatures battery
capacity is severely reduced, i.e. safe operating times are shorter in
cold weather.
The safe operating time varies greatly according to the number of
servos connected to the receiver, the stiffness of the linkages, and
the frequency of control commands which the pilot gives. A
standard servo draws between 150 and 600 mA when the motor is
running,and about 8 mA at idle. Super-servos and powerful digital
servos can draw peak currents of up to 1300 mA at full power.
Be sure to select a receiver battery with ample capacity,
bearing in mind the likely current drain and the number of
servos.
Ensure that all mechanical linkages are free-moving, and that the
servo is not obstructed in its travel. A servo running constantly
against a mechanical stop or limit draws a very high current, and
will also inevitably suffer damage in the long-term.
When the receiver battery is almost discharged, you may notice
that the servos respond much more slowly.The moment you notice
this, land the model immediately and recharge the battery. To
monitor the receiver battery during a session we recommend the
use of a battery controller,which gives you a useful idea of the state
of charge of the battery between flights.
Order Numbers
F4090 - F4091 - F4092
F4095 - F4096 - F4097
50
Retaining screw
Pushrod