22
EJEMPLO DE SETEO PARA UN AVIÓN DE ACROBACIA
Si el timón mueve en la dirección equivocada, active
la dirección contraria presionando en primera instan-
cia la tecla menos (-) de DATA INPUT. Accione el
stick izquierdo a izquierda y derecha verificando que
el timón se desplace en la dirección correcta.
9. Si su modelo posee tren retráctil, establezca la
correcta respuesta del servo, al accionar la llave de
tren, usando el mismo procedimiento.
10. Si se encuentra utilizando un segundo servo de
alerón, deberá setear en este momento la dirección
del servo que acciona el alerón izquierdo. (caso con-
trario pase directamente al punto 12). Este es el
canal 6 y un “6” en estado intermitente debe apare-
cer para poder conformar ésta orden. Cuando mueve
el stick derecho hacia la derecha, el alerón del semi-
ala izquierda debe descender. Chequee que el alerón
izquierdo mueva en la dirección deseada. Si no fuera
así, active la dirección opuesta del servo de alerón
izquierdo, presionando las teclas DATA INPUT.
Mueva ahora el stick derecho nuevamente verifican-
do que el alerón izquierdo mueve apropiadamente.
11. Diríjase a la función de trimado de Flap (FLTR),
ingrese un porcentaje de cero (0). Presione la tecla
CURSOR para activar la función. Esta actitud
desconecta temporariamente la perilla de Flap, en
forma tal que puede establecer el centrado neutral
de alerones sin considerar la posición establecida en
la perilla de Flap. Luego volveremos a establecer la
conexión.
12. Ahora procederemos a establecer los neutros de
los servos. Centre todos los trims, podrá asegurarse
que estén centrados, ya que percibirá un pequeño
click, cuando la leva del trim pase por el centro del
recorrido. Una vez concretados los centrados,
desmonte los tornillos de los cuernos de los servos
de elevador, alerón y timón (el del acelerador lo
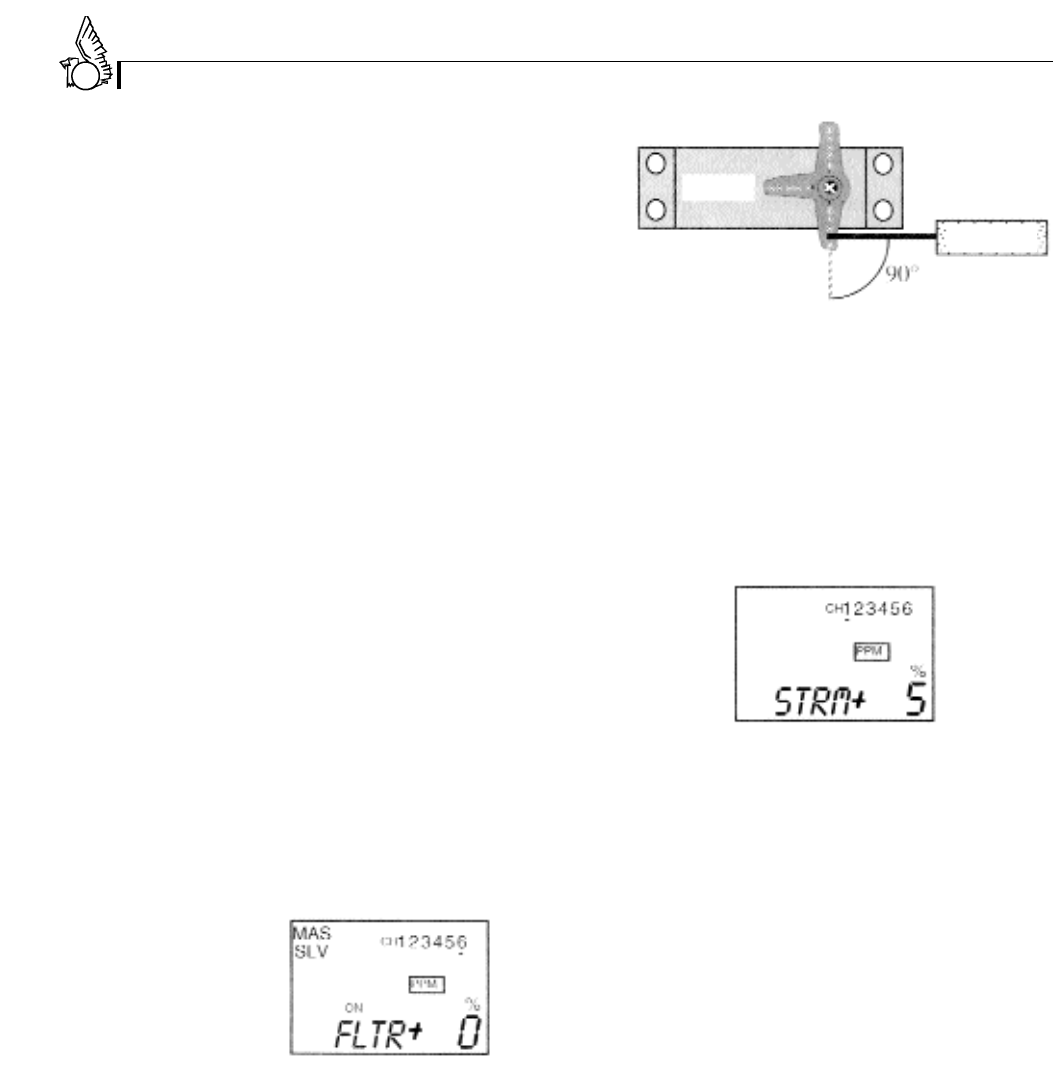
centraremos más adelante). Debe ahora recolocar los
cuernos de los servos en el eje del servo, en la posi-
ción próxima al neutro, esto es aproximadamente 90º
a los laterales de las cajas de servos o si el servo
esta montado lateralmente, 90º de la palanca de
conexión (pushrod). (no recomendamos instalar los
servos en forma lateral). De esta manera evitará la
aplicación innecesaria de subtrim.
Remueva todos los cuernos u obstáculos que se
hallen afectando el movimiento del servo y/o inter-
fieran con sus pushrods.
Ajuste los conectores (clevises) de cada pushrod
para obtener la posición de cada control que se
encuentre lo más próximo que pueda al neutro (alin-
eada con la porción adyacente del ala o de la cola).
13. Seguidamente procederemos a setear los subtrims
para establecer electrónicamente la posición neutral
esperada. Para lograr ello, obtenga el STRM menú
presionando los botones MODE hasta que el menú
aparezca en el display.
Fije el subtrim del alerón derecho primero, si la
pequeña flecha no apunta al canal 1, presione la
tecla CURSOR, hasta que lo haga (ver la figura).
Entonces ajuste la cantidad de subtrim incrementan-
do o disminuyendo la misma con las teclas DATA
INPUT. Cuando encuentre una posición en la que
ambos alerones coincidan con la parte fija del ala ,
finalizó la tarea. Si no puede establecer esta coinci-
dencia, resetee el subtrim a cero (0), y mecánica-
mente ajuste los clevis para lograr tan próximo
como pueda el centro, entonces reajuste el subtrim
si fuera necesario.
NOTA 1: No se debe utilizar el subtrim, cuando es
factible un ajuste mecánico, para centrar el
pushrod. Ello es debido a que el uso del subtrim,
puede limitar el recorrido de los movimientos del
radio, especialmente si los valores establecidos de
subtrim, se encuentran cercanos al 100%. Como se
dijo previamente, centre los pushrod en forma
mecánica primero, y luego use el subtrim para
lograr un centrado final.
NOTA 2: Si pierde el rastro del número correcto, o
encontró el porcentaje, pero de la dirección equivo-
cada, puede volver a cero rápidamente, presionando
simultáneamente ambas teclas de DATA INPUT.
14. Repita el procedimiento para el servo de elevador
(canal 2). Primero determine el largo del pushrod en
forma mecánica, para lograr la cercanía máxima al
neutro, entonces con el subtrim alinee el elevador en
forma paralela a la porción del estabilizador.
SERVO
PUSHROD