INSTALLATION DU ROBOT ASPIRATEUR
INSTALLATION DU MODULE MURS VIRTUELS
Vous pouvez restreindre le fonctionnement
du robot aspirateur à une zone particulière
en utilisant le mode « Fence » (mur virtuel) ou
nettoyer plusieurs zones une par une à l’aide
du mode « Guard » (porte virtuelle).
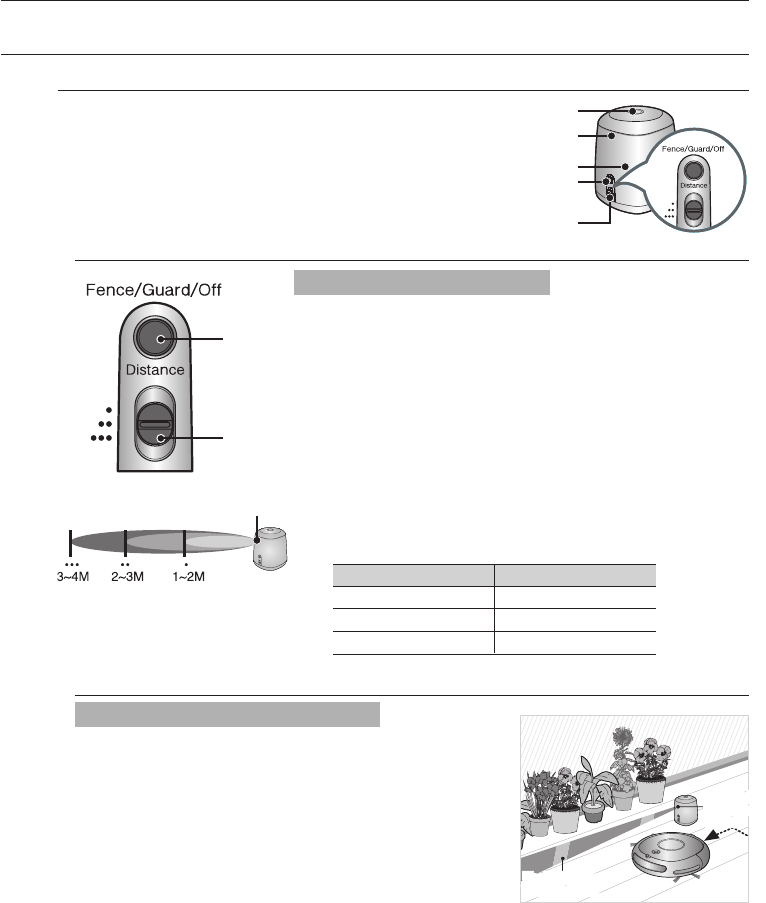
Témoin de mode
Capteur de détection
de distance
Capteur de détection de l’unité principale
Bouton Mode/
Mise en marche
Bouton de contrôle de la
distance
✽ Le capteur de détection de distance
forme une barrière rectiligne virtuelle
de la longueur spécifiée.
Capteur de détection de distance
• (courte)
•• (moyenne)
••• (longue)
Environ 1~2m
Environ 2~3m
Environ 3~4m
Réglage du bouton Distance maxi.
✽ Réglez le bouton en fonction de la distance souhaitée.
Fonctionnement des boutons
1. Fonctionnement du témoin de mode
- Mode Fence (mur virtuel) : le témoin est rouge
- Mode Guard (porte virtuelle) : le témoin est vert
- Off (désactivé) : le témoin est éteint
2. Réglage du mode
- L’actionnement du bouton Mode/Mise en marche
sélectionne tour à tour un mode dans l’ordre suivant_
mode Fence (mur virtuel) ➝ mode Guard (porte
virtuelle) ➝ désactivé.
3. Réglage de la longueur de la barrière
- Réglez la distance de restriction d’accès délimitée par
le module MURS VIRTUELS pour le robot aspirateur à
l’aide du bouton de la télécommande.
Création d’une barrière (mur virtuel)
Le module MURS VIRTUELS crée une barrière invisible
infranchissable pour le robot aspirateur.
Par ex. : devant des pots de eurs, des meubles, la
porte d’entrée, etc.
1. Sélectionnez le mode Fence (mur virtuel) à l’aide
du bouton Mode/Mise en marche.
- Le témoin de mode devient rouge.
2. Réglez la longueur de la barrière à l’aide du
bouton de contrôle de la distance.
3. Installez le module MURS VIRTUELS devant la zone dont vous souhaitez
bloquer l’accès pour le robot aspirateur.
- Orientez le module MURS VIRTUELS de manière à ce que son capteur de
détection de distance puisse former une barrière invisible infranchissable pour le
robot aspirateur.
2
3
Une barrière (mur
virtuel) se forme.
Capteur de
détection de
distance