TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
52
NAVMAN
ein- oder mehrfach drücken, bis das
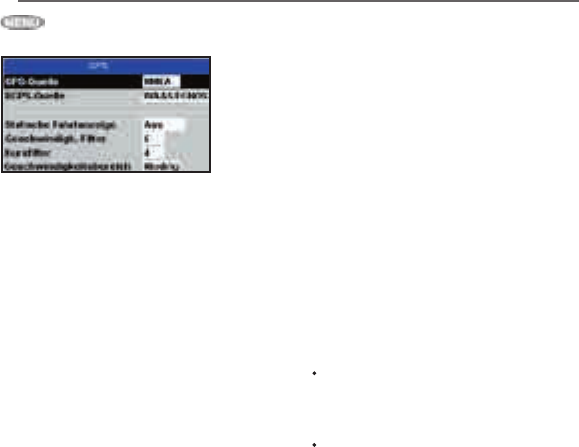
Setup-Menu erscheint. Dann GPS wählen.
GPS-Quelle
• Intern: Die interne GPS-Antenne
(TRACKER 5380i) oder die gelieferte
externe Antenne (TRACKER 5380)
benutzen (siehe Abschn. 15-5).
• NMEA: Eine externe GPS- oder DGPS-
Quelle über NMEA nutzen (siehe Abschn.
15-10).
• NavBus:Eine externe GPS- oder DGPS-
Quelle über den NavBus-Eingang nutzen
(siehe Abschn. 15-9).
DGPS-Quelle
Aktiviert oder unterdrückt die
satellitengestützte DGPS-Korrektur (siehe
Abschn. 7) Die Optionen sind ‘Keine’ oder
Waas/EGNOS. WAAS/EGNOS nicht außerhalb
ihrer Abdeckungs-Bereiche aktivieren. Die
Positions-Genauigkeit könnte herab gesetzt
werden.
WAAS deckt die gesamte USA und den größten
Teil Kanadas ab. Um WAAS zu nutzen, muss die
GPS Antenne freien Sichtkontakt zum Himmel
in Richtung Äquator haben. EGNOS wird den
größten Teil Westeuropas abdecken, wenn es
in Betrieb geht.
GPS Neustart
Führt einen Neustart für den internen
GPS-Empfänger durch (für Servicezwecke
oder Fehlerbehebung). Der GPS-Empfänger
benötigt bis zu drei Minuten für einen Neustart.
Das Satellitenbild zeigt den jeweiligen Status
des GPS-Empfängers (siehe Abschn. 7). Einen
Neustart durchführen, wenn der Empfänger
über einen längeren Zeitraum nicht benutzt
wurde und viel Zeit für einen GPS-Ort benötigt.
14-3 Setup > GPS
Statische Fahrtanzeige
Liegt das Boot fest oder bewegt sich nur
sehr langsam, können fehlerhafte GPS
Geschwindigkeits- und Kurs-Daten gezeigt
werden. Die statische Fahrtmessung ist
als dimensionslose Nummer gesetzt. Die
Möglichkeiten sind:
• 0,01 bis 99,9: Ist die Bootsbewegung
geringer als die gesetzte Zahl, wird die
Geschwindigkeit mit Null gezeigt und der
Kurs bleibt unverändert.
• 0(Aus): Die kalkulierten Fahrt- und
Kurs-Werte werden immer genutzt.
Fahrt- und Kurs-Filter
Wind und Wellen verursachen leichte
Schwankungen von Boots-Geschwindigkeit
und Kurs. Um stabile Anzeigen zu erhalten,
benutzt der TRACKER mehrere Messungen für
eine Mittelwertrechnung.
Ein kleiner Mittelungswert ergibt eine
Rechnung über eine kürzere Zeitperiode.
Das ergibt exaktere Werte mit jedoch
häufigeren Änderungen.
Ein größerer Mittelungswert ergibt eine
Rechnung über eine längere Zeitperiode.
Das ergibt stabilere Werte. Kurzzeitige
echte Änderungen der Geschwindigkeit
werden dabei jedoch nicht erfasst.
Die Fahrt- und Kurs-Filter auf einen möglichst
niedrigen Wert setzen, der noch stabile
Anzeigen ergibt. Jeder Filter ist von 1 bis 60
Sekunden oder auf Aus (0) einstellbar.
Speed-Bereich
Die maximale Anzeige auf einem Log-
Messgerät (siehe Abschn. 8) Einen für das Boot
passenden Bereich wählen.