Setting up the Normal Flight Condition: The Normal flight condition is typically utilized for hovering. The throttle and
collective pitch curves are adjusted to provide consistent engine RPM despite the increase/decrease in collective pitch of
the blades. This keeps the engine from “bogging down” under excessive load (like trying to accelerate a car on a steep hill
in 5th gear) or excessive RPM under insufficient load (like flooring the throttle while in neutral), risking engine damage.
As the 2 curves and revo. mixing are all interrelated, we will discuss all three first, then complete a sample setup.
Note that the normal throttle, pitch and revo curves are all available in the BASIC menu for simplicity. These may also be updated
later in the ADVANCE menu with the settings for the other 4 conditions [idle-up 1 (IDL1), idle-up 2 (IDL2) and idle-up 3 (IDL3), plus
throttle hold (HOLD)]. Note: The throttle and pitch curves for the normal condition are always on. They cannot be inhibited. The
other four conditions are activated with their throttle curves or throttle hold. For idle-ups, see p. 90. For throttle hold, see p. 88.
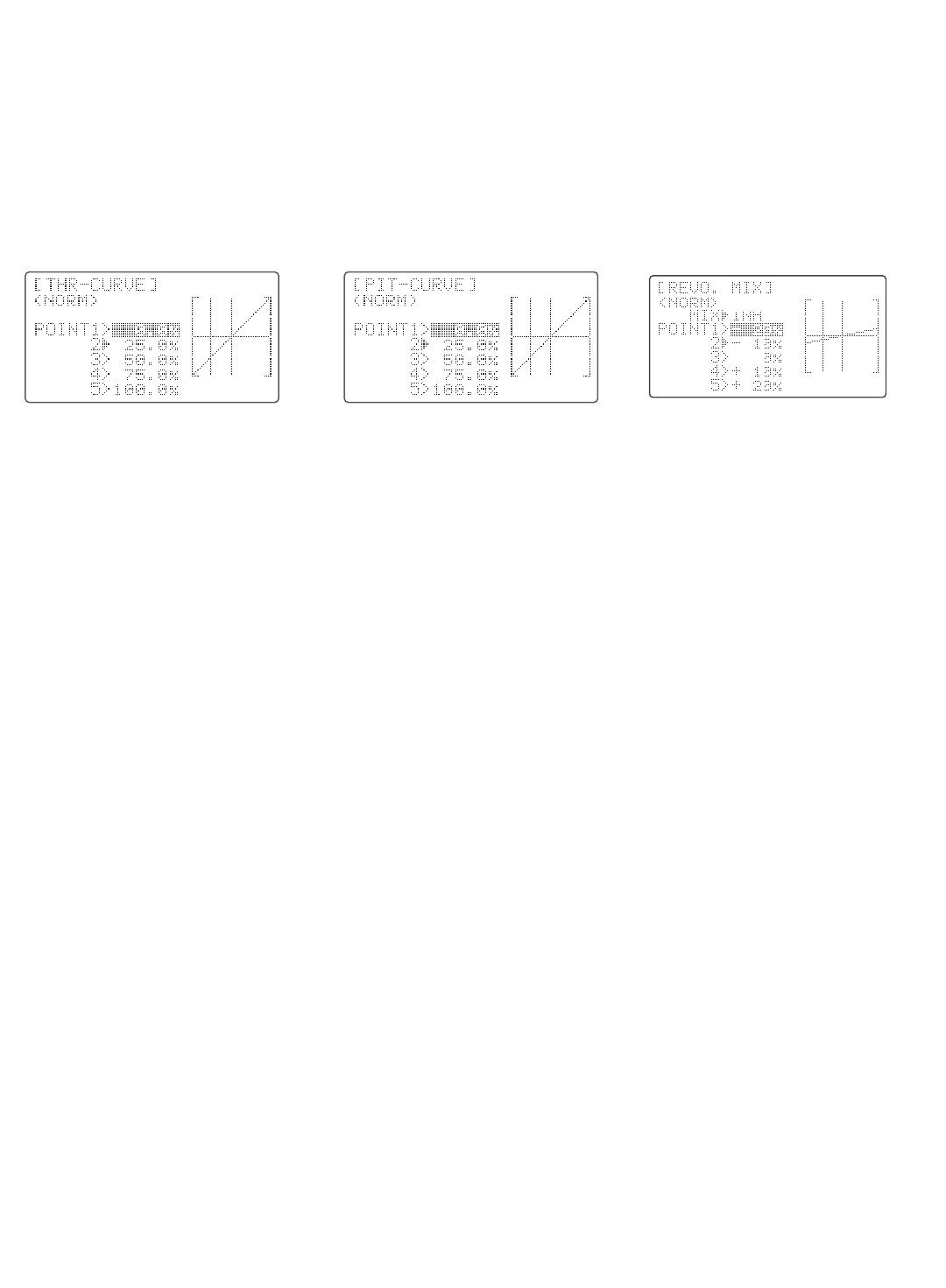
• TH-CV/NOR: inputs the normal (NORM) throttle curve, which is usually not a linear response to THROTTLE STICK
motion.
Adjusting point 3 of the curve adjusts the engine’s RPM at the THROTTLE STICK midpoint – the desired position for
hovering. The other 4 points are then adjusted to create the desired idle and maximum engine speed, and a smooth
transition in-between. For more on throttle curves, see p. 90.
• PI-CV/NOR: inputs the normal (NORM) collective pitch curve, the collective pitch curve for flight near hover. The
normal collective pitch curve is adjusted to match the throttle curve, providing the best vertical performance at a
constant engine speed, with a starting curve of –4 base, +5 neutral, and +8 to +10 degrees of blade pitch maximum*.
You can program the response over a 5-point curve for the best collective pitch angle relative to THROTTLE
STICK
movement. For more on collective pitch curves, see p. 90.
• REVO./NOR: mixes collective pitch commands to the rudder (a PITCH-RUDDER mix) to suppress the torque generated
by changes in the main rotor's collective pitch angle, keeping the model from yawing when throttle is applied. REVO.
is extremely helpful in “taming the tail” of models not using heading-hold/AVCS gyros. NOTE: There are three revo.
mixes available: normal (NORM), idle-up 1 / 2 (IDL1/2), and idle-up 3 (IDL3). All 3 are adjustable in the ADVANCE
menu. Never use revo. mixing in conjunction with heading-hold/AVCS gyros.For details on revo, including default
points for clockwise and counterclockwise rotating rotors, see p. 90.
*These default recommendations assume you are doing forward flight. If you are just learning, please follow your instructor’s guidance. Some
instructors like a +1 base point for training so that the helicopter comes down very slowly, even if your instincts pull the throttle/collective stick to
the bottom in a hurry.
86