ComNav Vector G2 & G2B Installation & Operation Appendices
Document PN 29010078 V2.0 - 79 -
DRAFT #3 – 29 May 2009
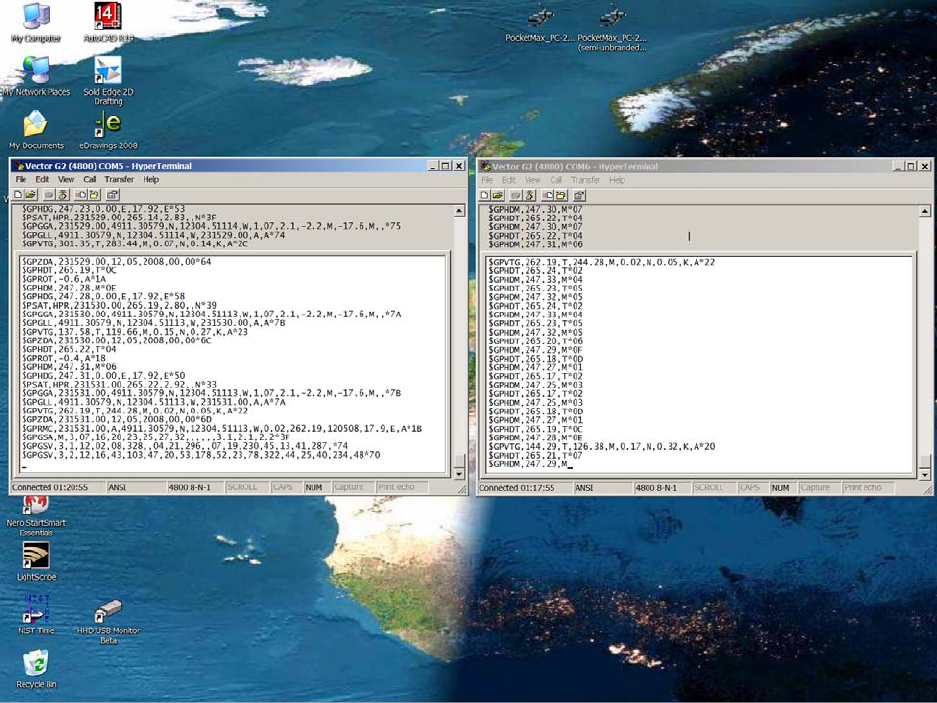
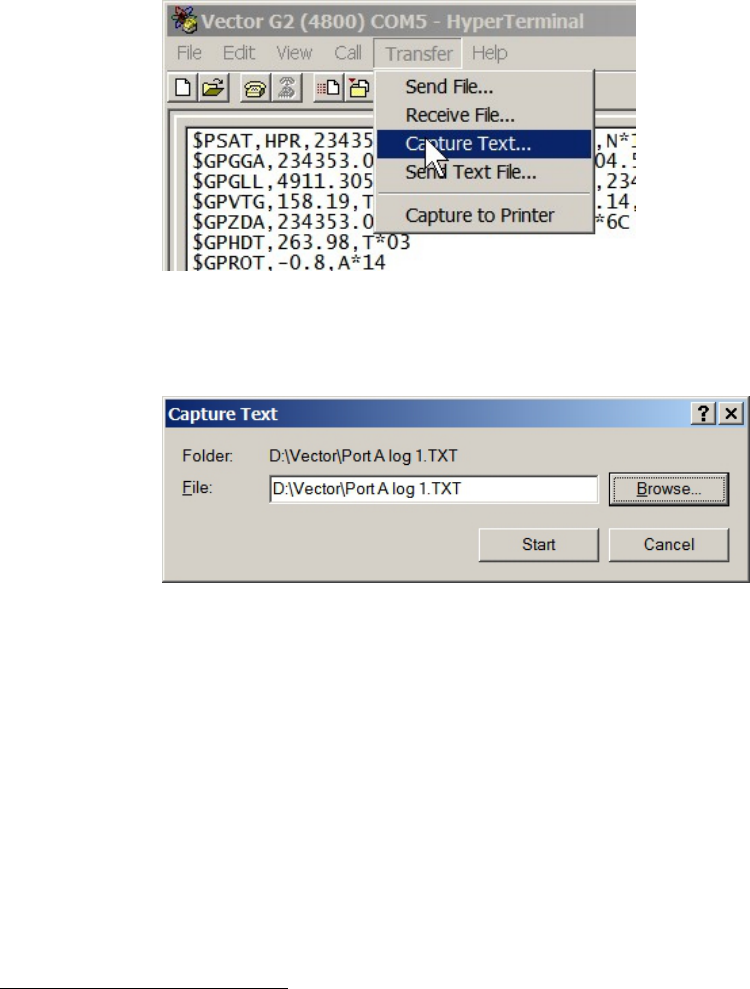
This is 5 seconds (i.e., one full sequence of all the factory-default enabled sentences) of
typical output from Port A, captured into a text file (see also the examples on page 85):
$GPHDT,264.09,T*0C
$GPROT,-2.4,A*1A
$GPHDM,246.37,M*01
$GPHDG,246.37,0.00,E,17.72,E*59
$PSAT,HPR,232346.00,264.09,6.88,,N*31
$GPGGA,232346.00,4911.30205,N,12304.50987,W,2,05,2.5,4.3,M,-17.6,M,5.8,0304*7D
$GPGLL,4911.30205,N,12304.50987,W,232346.00,A,D*72
$GPVTG,1.56,T,343.84,M,0.14,N,0.26,K,D*2D
$GPZDA,232346.00,14,05,2009,00,00*6F
$GPHDT,264.10,T*04
$GPROT,18.9,A*01
$GPHDM,246.38,M*0E
$GPHDG,246.38,0.00,E,17.72,E*56
$PSAT,HPR,232347.00,264.10,7.08,,N*31
$GPGGA,232347.00,4911.30205,N,12304.50986,W,2,05,2.5,4.3,M,-17.6,M,5.6,0304*73
$GPGLL,4911.30205,N,12304.50986,W,232347.00,A,D*72
$GPVTG,301.26,T,283.54,M,0.10,N,0.18,K,D*20
$GPZDA,232347.00,14,05,2009,00,00*6E
$GPHDT,264.00,T*05
$GPROT,-5.9,A*10
$GPHDM,246.28,M*0F
$GPHDG,246.28,0.00,E,17.72,E*57
$PSAT,HPR,232348.00,264.00,7.02,,N*35
$GPGGA,232348.00,4911.30205,N,12304.50984,W,2,05,2.5,4.4,M,-17.6,M,6.0,0304*7C
$GPGLL,4911.30205,N,12304.50984,W,232348.00,A,D*7F
$GPVTG,217.12,T,199.40,M,0.18,N,0.33,K,D*2D
$GPZDA,232348.00,14,05,2009,00,00*61
$GPHDT,264.27,T*00
$GPROT,0.6,A*37
$GPHDM,246.55,M*05
$GPHDG,246.55,0.00,E,17.72,E*5D
$PSAT,HPR,232349.00,264.27,6.72,,N*37
$GPGGA,232349.00,4911.30203,N,12304.50982,W,2,05,2.5,4.4,M,-17.6,M,5.8,0304*76
$GPGLL,4911.30203,N,12304.50982,W,232349.00,A,D*7E
$GPVTG,121.77,T,104.05,M,0.13,N,0.24,K,D*20
$GPZDA,232349.00,14,05,2009,00,00*60
$GPHDT,264.32,T*04
$GPROT,18.7,A*0F
$GPHDM,246.60,M*03
$GPHDG,246.60,0.00,E,17.72,E*5B
$PSAT,HPR,232350.00,264.32,6.48,,N*32
$GPGGA,232350.00,4911.30203,N,12304.50979,W,2,05,2.5,4.5,M,-17.6,M,5.6,0304*75
$GPGLL,4911.30203,N,12304.50979,W,232350.00,A,D*72
$GPVTG,308.82,T,291.10,M,0.04,N,0.07,K,D*2F
$GPZDA,232350.00,14,05,2009,00,00*68
$GPRMC,232350.00,A,4911.30203,N,12304.50979,W,0.04,308.82,140509,17.7,E,D*13
$GPGSA,M,3,03,07,13,20,23,,,,,,,,3.9,2.5,3.0*35
$GPGSV,3,1,12,01,15,108,,02,05,330,,03,10,118,45,04,10,270,*78
$GPGSV,3,2,12,07,46,250,49,08,49,246,,13,74,314,49,20,19,176,43*76
$GPGSV,3,3,12,23,66,108,53,25,03,069,,27,85,302,,32,03,160,*73
$GPGST,232350.00,1.1,2.4,1.1,347.9,2.4,1.2,3.2*59
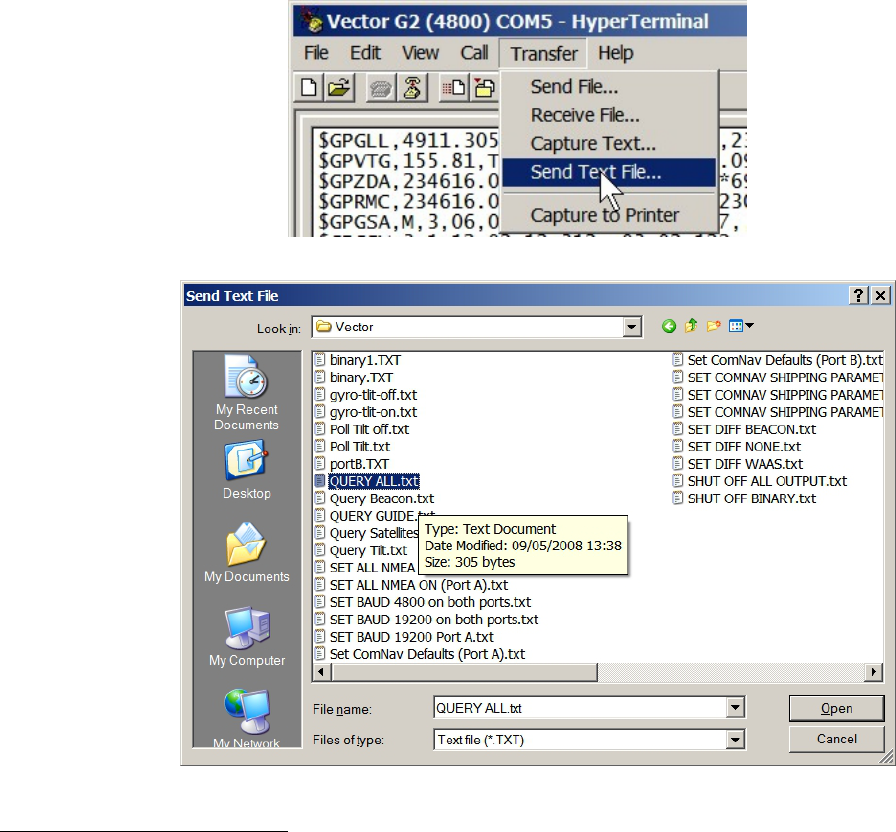
This is 1 second (i.e., one full sequence of all the factory-default enabled sentences) of
typical output from Port B, captured approximately simultaneously with Port A above:
$GPHDT,264.05,T*00
$GPHDM,246.33,M*05
$GPHDT,264.09,T*0C
$GPHDM,246.38,M*0E
$GPHDT,264.12,T*06
$GPHDM,246.41,M*00
$GPHDT,264.21,T*06
$GPHDM,246.49,M*08
$GPHDT,264.21,T*06
$GPHDM,246.49,M*08
$GPHDT,264.21,T*06
$GPHDM,246.50,M*00
$GPHDT,264.23,T*04
$GPHDM,246.51,M*01
$GPHDT,264.29,T*0E
$GPHDM,246.57,M*07
$GPHDT,264.32,T*04
$GPHDM,246.60,M*03
$GPHDT,264.34,T*02
$GPHDM,246.62,M*01
$GPVTG,273.73,T,256.02,M,0.08,N,0.15,K,D*2B
www.busse-yachtshop.de | info@busse-yachtshop.de