Robot con telecomando (da un’area all’altra), trasferi-
mento,
29
Robot senza filo perimetrale, avviamento, 27
Robot, arresto automatico, 28
Robot, dismissione, 43
Robot, pulizia, 35
S
Scopo del manuale,
4
Segnali di sicurezza, 9
Sicurezza per l'uomo e l'ambiente in fase di smaltimen-
to,
9
Sicurezza, norme per la, 8
Sostituzione batterie, 40
Sostituzione lama, 43
Sostituzione parti, raccomandazioni per la, 40
T
Tabella intervalli di manutenzione programmata,
35
Telecomando, descrizione, 25
Telecomando, procedura di programmazione, 29
Tensione catene, regolazione, 21
Trasferimento del robot con telecomando (da un’area
all’altra),
29
Trasferimento manuale del robot (da un’area all’altra), 29
U
Uso, consigli per,
34
Uso, raccomandazioni per, 23
INDICE ANALITICO
È vietata la riproduzione, anche parziale, di questo documento senza l’autorizzazione scritta del costruttore. Egli è impegnato in una politica di continuo miglioramento e si riserva il diritto di modificare questo do-
USE AND FUNCTIONING ............................23
ORDINARY MAINTENANCE ......................34
FAILURES, CAUSES AND SOLUTIONS ..37
PARTS REPLACEMENTS ............................40
CONTENTS
A
Adjustments, recommendations for,
21
Appliance and manufacturer, identification, 4
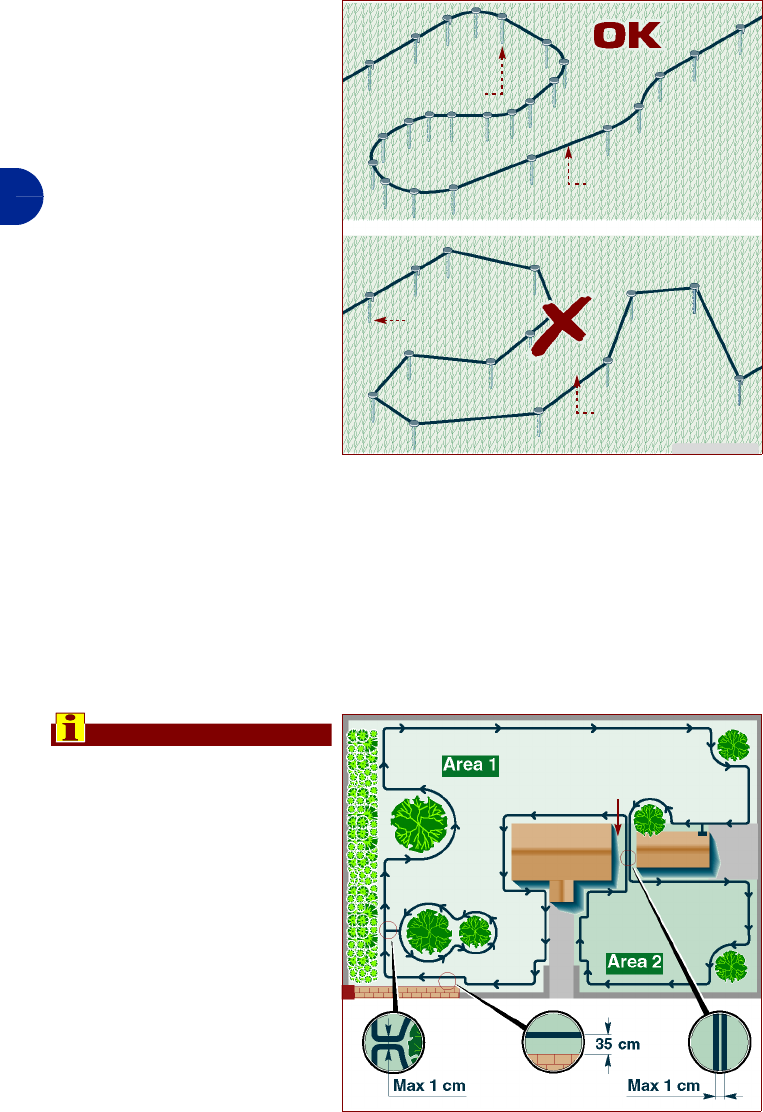
Arrangement and marking of the working area, 12
Assistance request, mode, 5
Assistance, request mode, 5
B
Batteries replacement,
40
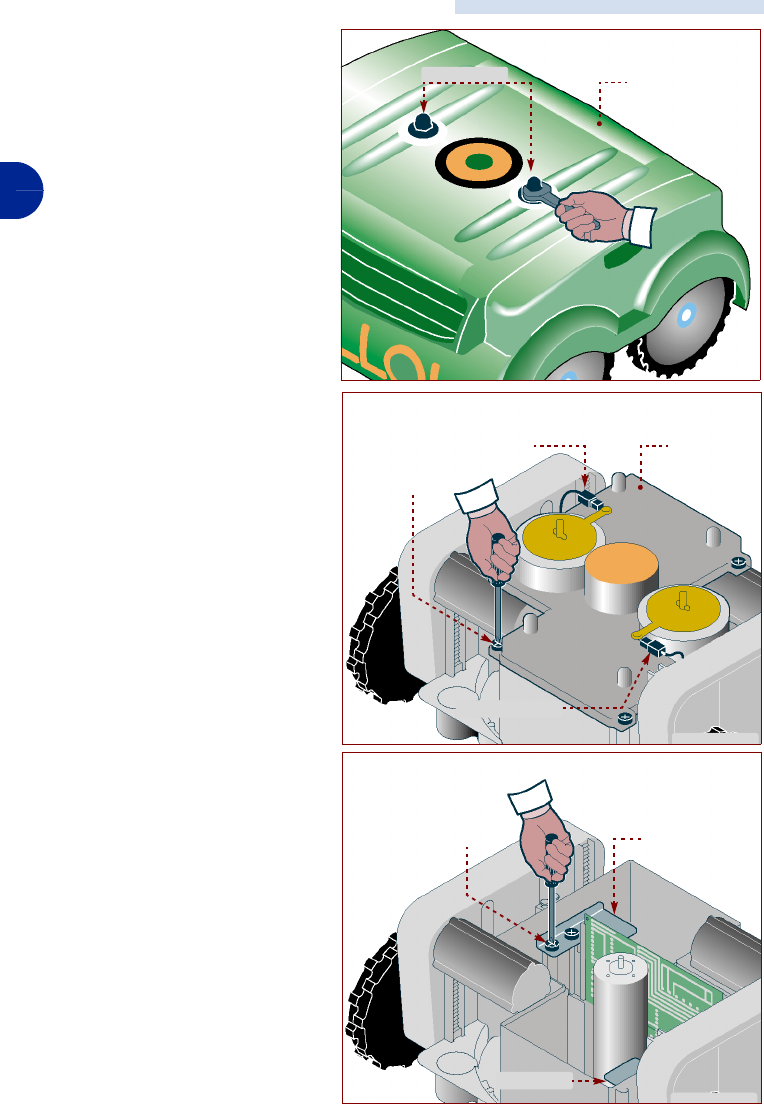
Battery connection, installation, 18
Battery installation and connection, 18
Battery recharge, 30
Blade installation, 21
Blade, replacements, 43
C
Chain tension adjustment,
21
Cutting height setting, 31
D
Drive chains lubrication,
36
E
Equipment installation planning,
10
Equipment, general description, 5
G
General description of the equipment,
5
I
Identification of manufacturer and appliance,
4
Installation, planning installation, 10
M
Maintenance, recommendations for,
34
Manual start and stop of the robot, 26
Manual, purpose of, 4
Manufacturer and appliance, identification, 4
P
Packaging and unpacking,
10
Parts replacement, recommendations for, 40
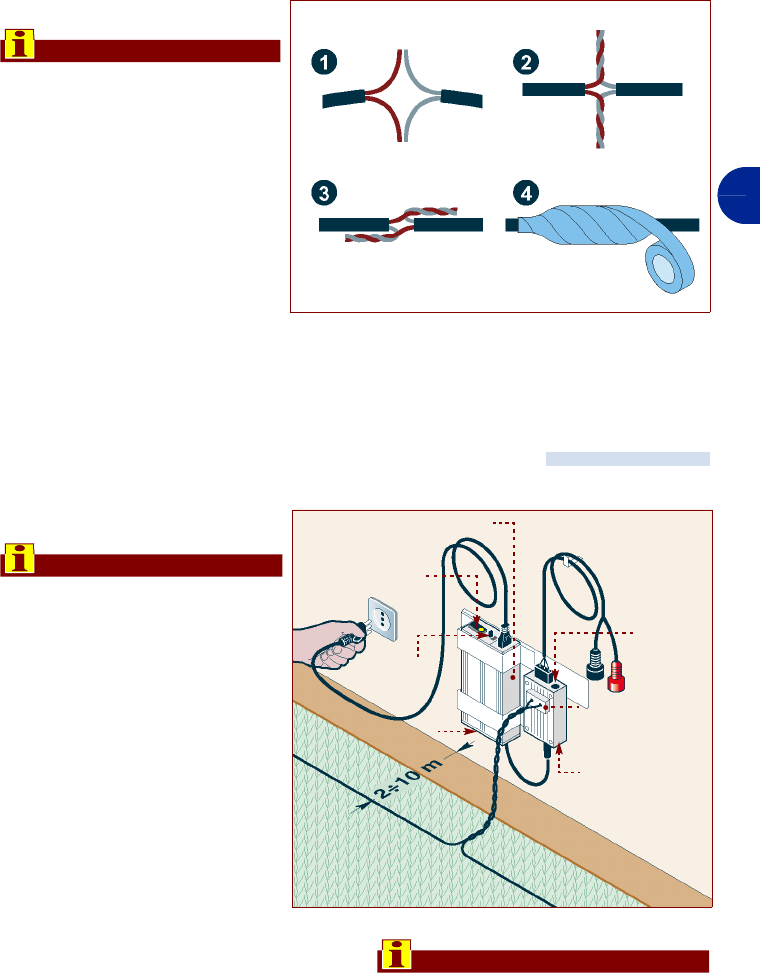
Perimeter wire installation, 15
Power supply-transmitter unit installation, 17
Procedure to request technical assistance, 5
Programmed maintenance intervals chart, 35
Prolonged inactivity and service restart, 34
Purpose of the manual, 4
R
Recommendations for adjustments,
21
Recommendations for maintenance, 34
Recommendations for part replacement, 40
Recommendations for use, 23, 34
Remote control description, 25
Remote control programming procedure, 29
Replace the blade, 43
Robot (from one area to another), manual transfer, 29
Robot automatic stop, 28
Robot cleaning, 35
Robot controls description, 23
Robot disposal, 43
Robot manual stop, and start, 26
Robot manual transfer (from one area to another), 29
Robot safety stop, 27
Robot start without perimeter wire, 27
Robot transfer by remote control (from one area to
another),
29
Robot without perimeter wire, start, 27
S
Safety for man and the environment during disposal,
9
Safety rules, 8
Safety signals, 9
Specifications, 7
T
Troubleshooting,
37
U
Unpackaging and packing,
10
Use, recommendations for, 23, 34
W
Working area, arrangement and marking,
12
ANALYTICAL CONTENTS
Reproduction, even partial, of this document without written permission by the ma nufacturer is forbidden. The manufacturer assumes a policy of continual improvement and reserves the right to modify this do-
cument without prior notice on condition that modifications do not const itute safety risks.
Commande à distance, procédure de programmation, 29
Commandes du robot, description, 23
Configuration de la hauteur de coupe, 31
Connexion des batteries, installation, 18
Conseils d’emploi, 34
Consignes de sécurité, 8
Constructeur et appareillage, identification, 4
Contact avec le service après-vente, 5
D
Déballage et emballage,
10
Demande service après-vente, modalité de, 5
Démarrage du robot sans fil périmétral, 27
Démarrage et arrêt manuel du robot, 26
Dépistage des pannes, 37
Déplacement du robot par la commande à distance
(d’une zone à l’autre),
29
Déplacement manuel du robot (d’une zone à l’autre), 29
Description de la commande à distance, 25
Description des commandes du robot, 23
Description générale de l’appareillage, 5
Données techniques, 7
E
Elimination du robot,
43
Emballage et déballage, 10
Emploi, conseils, 23, 34
Entretien programmé, tableau des fréquences, 35
Entretien, conseils, 34
F
Fil périmétral, installation,
15
G
Graissage des chaînes de transmission,
36
Groupe alimentateur-émetteur, installation, 17
H
Hauteur de coupe, configuration,
31
I
Identification du fabricant et de l’appareil,
4
Inactivité prolongée et remise en service, 34
Installation de la lame, 21
Installation du fil périmétral, 15
Installation du groupe alimentateur-émetteur, 17
Installation et connexion des batteries, 18
Installation, planification, 10
L
Lame, installation,
21
Lame, remplacement, 43
M
Manuel, but du,
4
Mise au point, conseils de, 21
N
Nettoyage du robot,
35
P
Pannes, dépannage,
37
Planification du positionnement de l’installation, 10
Préparation et délimitation de la zone de travail, 12
Procédure de programmation de la commande à dis-
tance,
29
R
Recharge des batteries,
30
Recommandations d’emploi, 23
Recommandations de réglage, 21
Recommandations pour l’entretien, 34
Recommandations pour le remplacement des pièces, 40
Réglage de la tension des chaînes, 21
Remise en service, inactivité prolongée, 34
Remplacement des batteries, 40
Remplacement des pièces, conseils, 40
Remplacement lame, 43
Robot (d’une zone à l’autre), déplacement manuel, 29
Robot pourvu de commande à distance (d’une zone à
l’autre), déplacement,
29
Robot sans fil périmétral, démarrage, 27
Robot, arrêt automatique, 28
Robot, élimination, 43
Robot, nettoyage, 35
S
Santé des personnes et sécurité de l’environnement
lors de l’élimination,
9
Sécurité, consignes de, 8
Service après-vente, modalité de demande, 5
Signaux de sécurité, 9
T
Tableau des fréquences d’entretien programmé,
35
Tension des chaînes, réglage, 21
Z
Zone de travail, préparation et délimitation,
12
INDEX
La reproduction, même partielle, de ce manuel sans l'auto risation écrite du fabricant est interdite. Celui-ci, soucieux de poursuivre une politique de développement const ant, se réserve le droit d'apporter des mo-
UND ABHILFEN ..............................................37
AUSWECHSELN DER KOMPONENTEN 40
INHALT
A
Allgemeine Beschreibung des Geräts,
5
Austauschen der Klinge, 43
Automatischer Stopp des Roboters, 28
B
Batterieladung,
30
Batteriewechsel, 40
Beschreibung der Bedienungselemente des Robo-
ters,
23
Beschreibung der Fernbedienung, 25
E
Einstellung der Schnitthöhe,
31
Einstellung der Spannung der Ketten, 21
Empfehlungen zum Austausch von Bauteilen, 40
Empfehlungen zur Einstellung, 21
Empfehlungen zur Wartung, 34
G
Gebrauchsempfehlungen,
23, 34
I
Identifikation des Herstellers,
4
Identifikation des Herstellers und der Maschine, 4
Installation der Klinge, 21
Installation der Speisegerät-Sende-Einheit, 17
Installation des Begrenzungsdrahts, 15
Installation und Anschluss der Batterien, 18
L
Längerer Betriebsstillstand und erneute Inbetrieb-
nahme,
34
M
Manueller Transfer des Roboters (von einem Be-
reich in den anderen),
29
Modalität für die Kundendienstanforderung, 5
P
Planung der Installation der Anlage,
10
Programmierung der Fernbedienung, 29
R
Ratschläge für die Wartung,
34
Reinigung des Roboters, 35
S
Schmierung der Antriebsketten,
36
Sicherheit für Mensch und Umwelt in der Entsor-
gungsphase,
9
Sicherheitsnormen, 8
Sicherheitssignale, 9
Start des Roboters ohne Begrenzungsdraht, 27
Start und manueller Stopp des Roboters, 26
Stopp in Sicherheitsbedingung des Roboters, 27
Störungssuche, 37
T
Tabelle der Abstände der programmierten War-
tung,
35
Technische Daten, 7
Transfer des Roboters (von einem Bereich in einen
anderen) mit der Fernbedienung,
29
V
Verpackung und Auspacken,
10
Verpackung und Herausnahme aus der Verpak-
kung,
10
Vorbereitung und Eingrenzung des Arbeitsbereichs, 12
Vorgaben zur Sicherheit, 8
Vorgehensweise zur Anforderung des Kundendien-
stes,
5
Vorschriften für das Auswechseln von Teilen, 40
Vorschriften für den Gebrauch, 23
Vorschriften für die Einstellungen, 21
W
Wichtige Hinweise für den Gebrauch,
34
Z
Zerlegung des Roboters,
43
Zweck des Handbuchs, 4
Zwecks dieses Handbuchs, 4
STICHWORTVERZEICHNIS
Die vollständige oder auszugsweise Reproduktion dieses Dokuments in irgendeiner Form ohne Genehmigung des Herstellers ist verboten. Der Hersteller ist um die ständige Verbesserung seines Produkts bemüht
Desplazamiento del robot con telemando (de un área
a otra),
29
Desplazamiento manual del robot (de un área a otra), 29
E
Embalaje y desembalaje,
10
F
Fabricante y aparato, identificación,
4
Finalidad del manual, 4
G
Grupo alimentador-transmisor, instalación,
17
I
Identificación del constructor y del aparato,
4
Instalación alambre perimétrico, 15
Instalación cuchilla, 21
Instalación grupo alimentador-transmisor, 17
Instalación y conexión baterías, 18
Instalación, sistema planificación, 10
L
Limpieza robot,
35
Localización de problemas, 37
Lubricación cadenas de transmisión, 36
M
Mandos robot, descripción,
23
Mantenimiento programado, tabla intervalos de, 35
Mantenimiento, recomendaciones para el, 34
Manual, finalidad del, 4
Modalidades de petición de asistencia, 5
N
Normas de seguridad,
8
P
Parada automática del robot,
28
Parada de seguridad del robot, 27
Parada manual del robot, y puesta en marcha, 26
Planificación instalación equipo, 10
Preparación y delimitación área de trabajo, 12
Procedimiento de programación telemando, 29
Programación altura corte, 31
Puesta en marcha robot sin alambre perimétrico, 27
Puesta en marcha y parada manual del robot, 26
Puesta en servicio tras una inactividad prolongada, 34
Puesta en servicio, inactividad prolongada, 34
R
Recarga baterías,
30
Recomendaciones para el servicio de mantenimiento, 34
Recomendaciones para el uso, 23
Recomendaciones para la sustitución de piezas, 40
Reglaje tensión cadenas, 21
Reglajes, recomendaciones para los, 21
Robot (de un área a otra), desplazamiento manual, 29
Robot con telemando (de un área a otra), desplaza-
miento,
29
Robot sin alambre perimétrico, puesta en marcha, 27
Robot, desguace, 43
Robot, limpieza, 35
Robot, parada automática, 28
S
Seguridad para el hombre y el medioambiente en fase
de eliminación,
9
Seguridad, normas para la, 8
Señales de seguridad, 9
Solicitud de asistencia, modalidad de, 5
Sustitución baterías, 40
Sustitución de la cuchilla, 43
Sustitución partes, recomendaciones para la, 40
T
Tabla intervalos de mantenimiento programado,
35
Telemando, descripción, 25
Telemando, procedimiento de programación, 29
Tensión cadenas, regulación, 21
U
Uso, consejos para el,
34
Uso, recomendaciones para el, 23
ÍNDICE ANALÍTICO
Está prohibida la reproducción, incluso parcial, del presente documento sin la autorización expresa del constructor. El constructor, en la óptica de mejorar continuamente sus productos, se reserva el derecho a modificar esta
paginación: IDM esperti in comunicazione tecnica - Forlí (Italia) - El constructor tendrá derecho a reproducir, de forma total o parcial, los textos del presente documento siempre y cuando cite al autor.
- 4 -
C141501600.fm
Manual de uso
E
Este manual, que es una parte integrante
del equipo, ha sido redactado por el fabri-
cante para proporcionar la información ne-
cesaria al personal autorizado para
trabajar con el equipo durante el periodo
previsto de vida útil.
Además de tomar las medidas de utiliza-
ción correctas los destinatarios de las
informaciones tendrán que leerlas aten-
tamente y aplicarlas rigurosamente.
Estas informaciones han sido escritas
por el fabricante en su idioma original
(italiano) y pueden ser traducidas en
otros idiomas para satisfacer las exigen-
cias legislativas y/o comerciales.
El tiempo dedicado a la lectura de las
mencionadas informaciones evitará po-
sibles riesgos a la salud y a la seguridad
de personas, además de evitar daños
económicos.
Guardar este manual durante toda la
vida útil del equipo en un lugar conocido
y accesible, para que esté disponible
siempre que sea necesario consultarlo.
El fabricante se reserva el derecho de lle-
var a cabo modificaciones sin tener que
proporcionar tempestivamente ninguna
comunicación.
Con el fin de evidenciar algunas partes
especialmente importantes de textos o
bien para señalar las especificaciones
más significativas, se adoptaron algunos
símbolos cuyo significado se detalla a
continuación.
Peligro - Atención
Indica situaciones de grave peligro que,
cuando descuidadas, pueden perjudi-
car de modo muy serio la salud y la se-
guridad de las personas.
Cautela - Advertencia
Indica que se deben adoptar medidas
adecuadas para no perjudicar la salud
y la seguridad de las personas y para
evitar daños económicos.
Importante
Señala informaciones técnicas espe-
cialmente importantes que no se de-
ben descuidar.
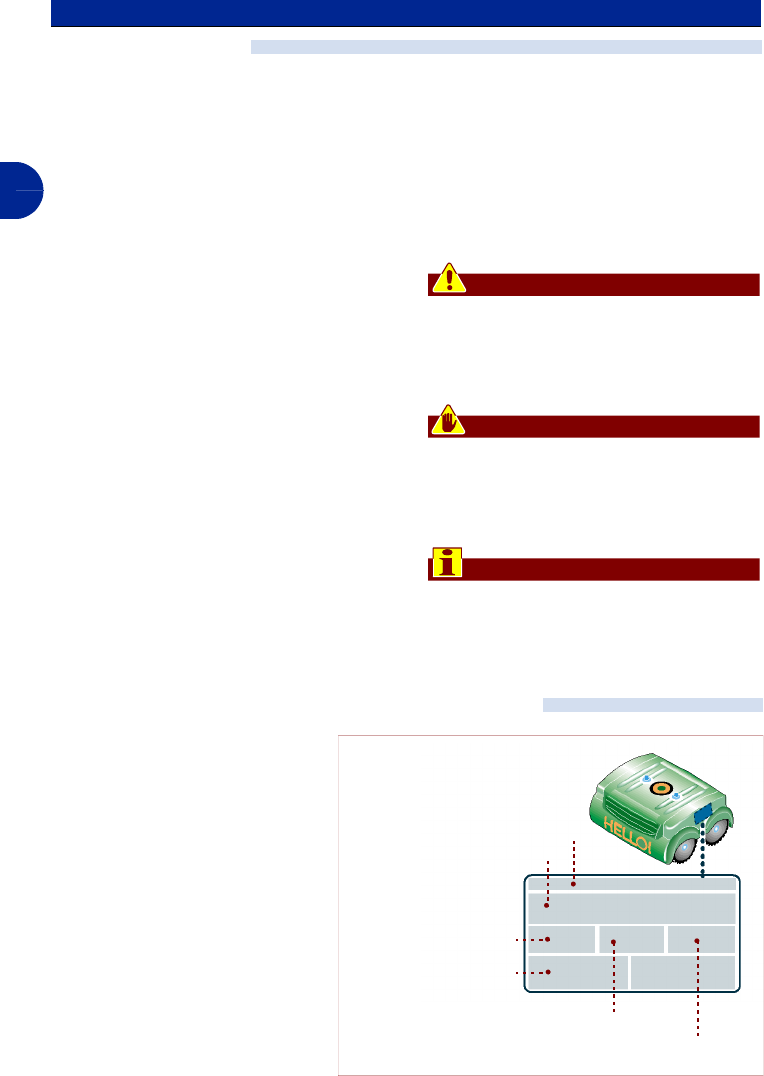
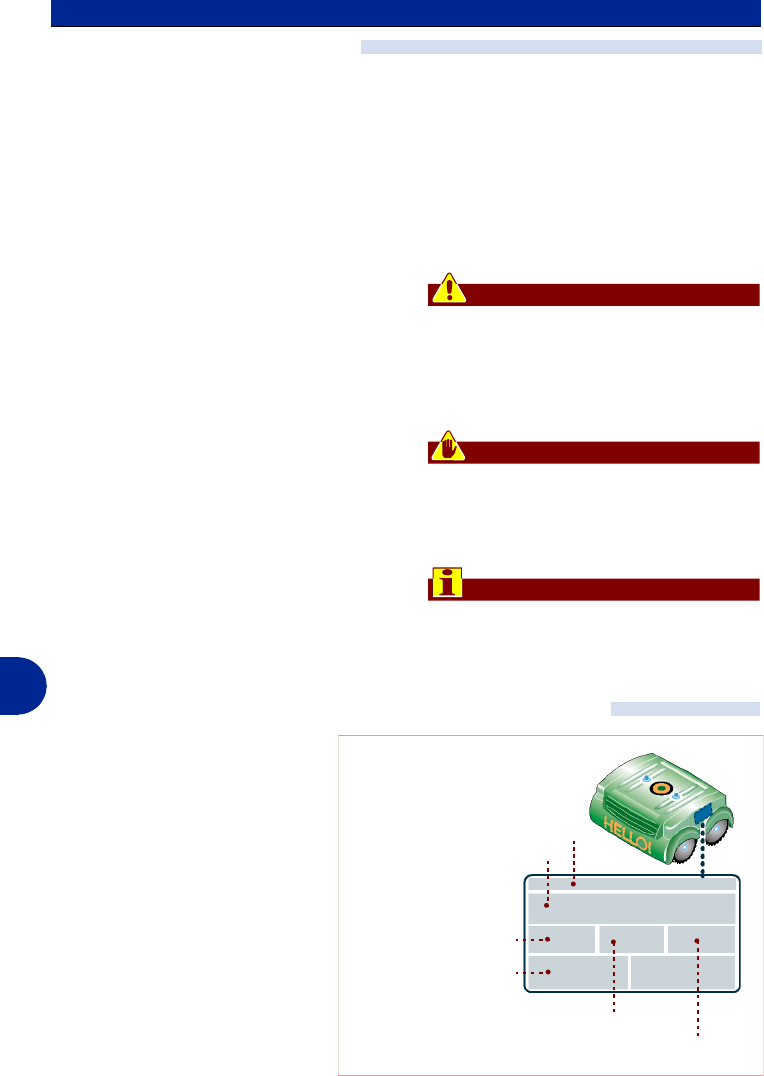
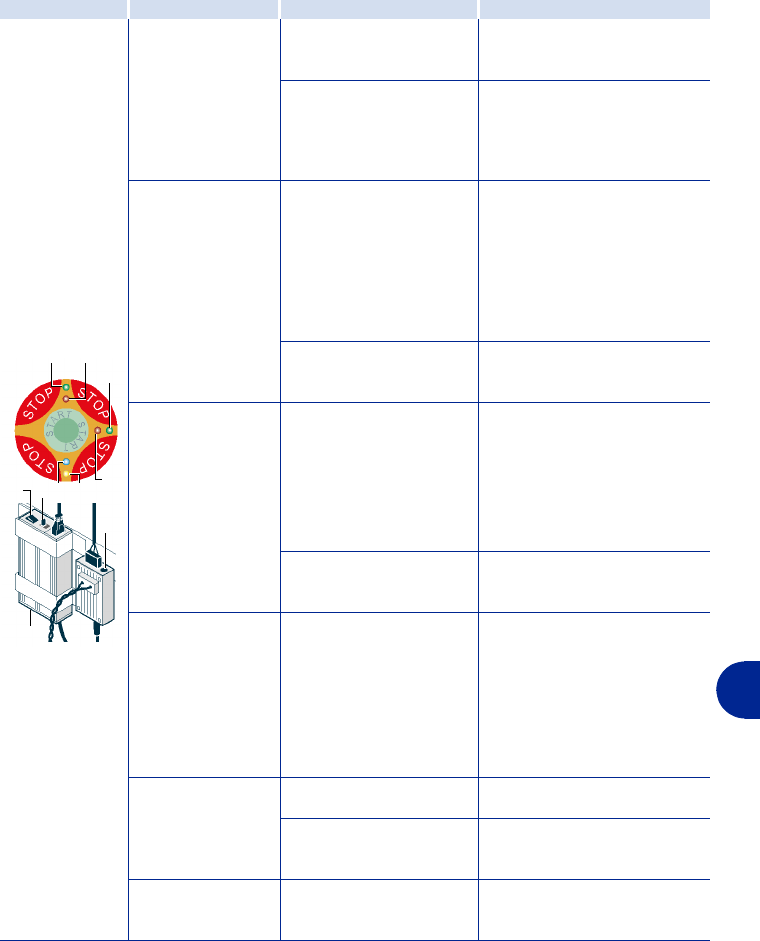
La placa de características repro-
ducida se encuentra aplicada di-
rectamente en el aparato. En ella
aparecen las referencias y todas
las indicaciones indispensables
para la seguridad de servicio.
A)Identificación del fabricante
B)Marca CE de conformidad
C)Modelo/número de matrícula/
año de fabricación.
D)Datos técnicos
INFORMACIONES GENERALES
FINALIDAD DEL MANUAL
IDENTIFICACIÓN DEL CONSTRUCTOR Y DEL APARATO
IDM - 41501600100.tif
identificación fabricante (A)
marca CE de conformidad (B)
modelo (C)
datos técnicos (D)
número de matrícula (C)
año de fabricación (C)
- 5 -
C141501600.fm
Manual de uso
E
Por cualquier pedido de asistencia técni-
ca, indicar los datos que figuran en la pla-
ca de identificación, las horas
aproximadas de utilización y el tipo de de-
fecto encontrado.
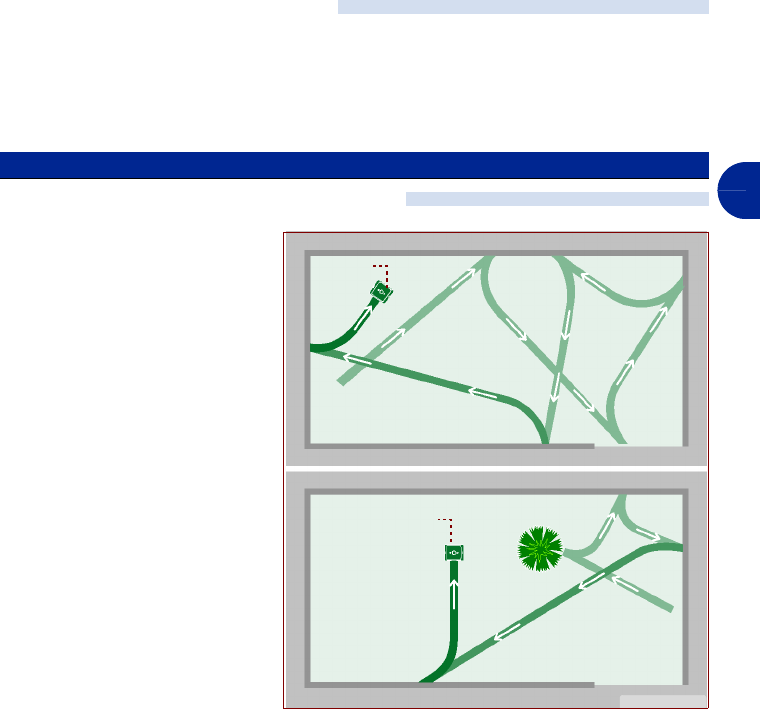
El aparato Ambrogio Line 100 es
un robot diseñado y construido para
cortar automáticamente el césped
de jardines y prados de viviendas a
cualquier hora del día. Es pequeño,
compacto, silencioso, impermeable
y fácil de transportar.
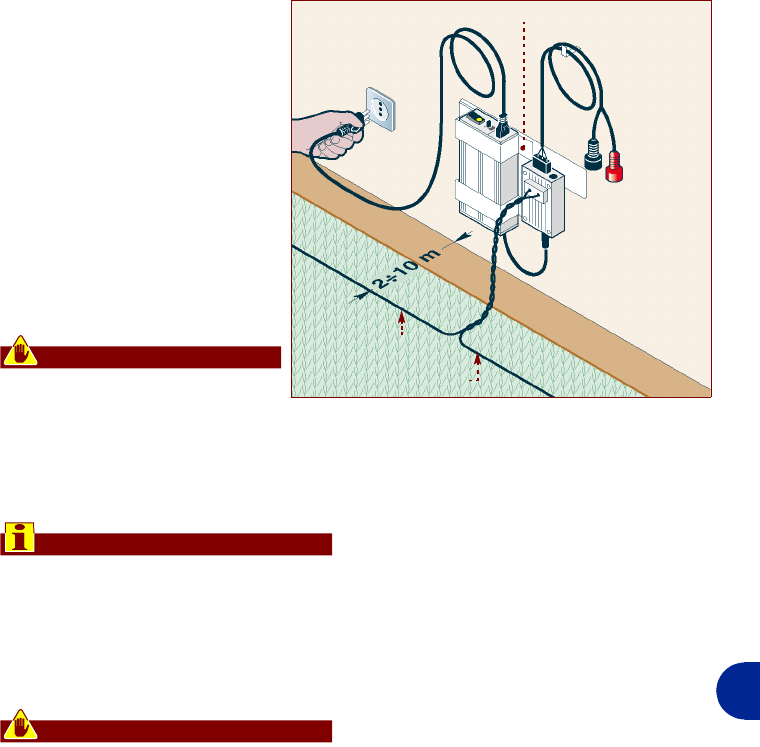
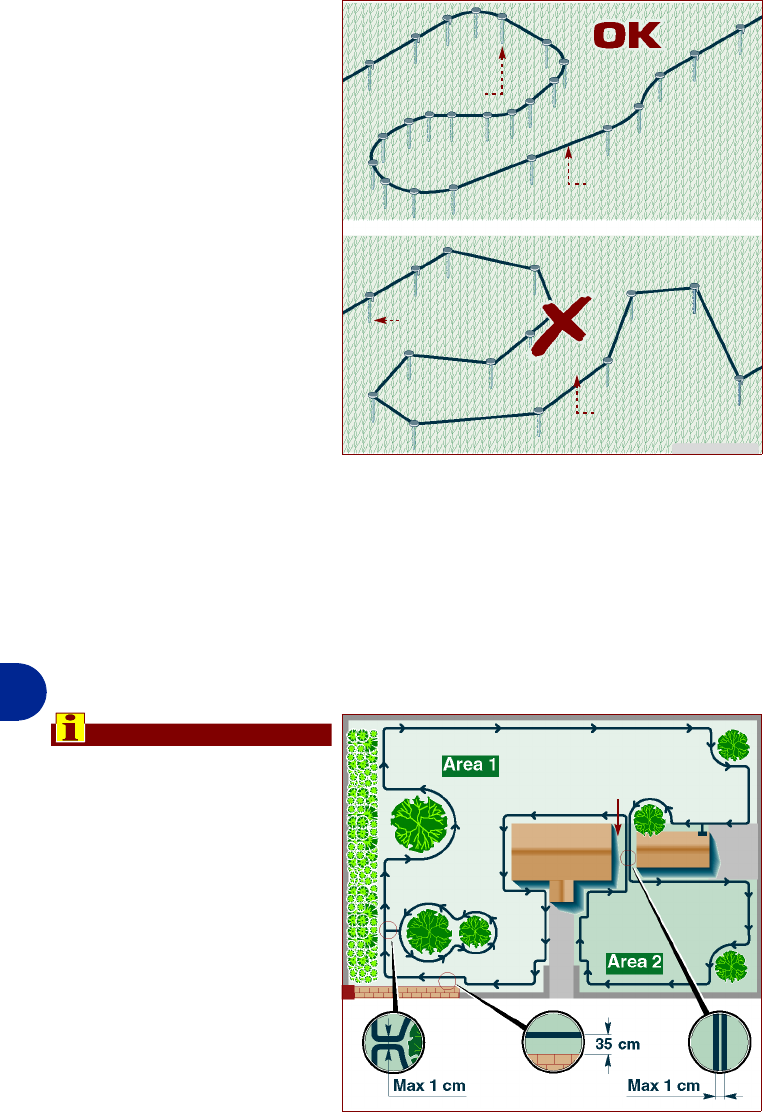
Durante el funcionamiento, el robot
efectúa el corte del área delimitada
por el alambre perimétrico y/o por
barreras (vallas, muros, etc.).
Cuando el robot detecta el alam-
bre perimétrico o encuentra un
obstáculo invierte el sentido de
marcha y cambia trayectoria de
manera casual.
En base al principio de funciona-
miento ("random"), el robot efectúa
el corte automático y completo del
prado delimitado (veáse figura)
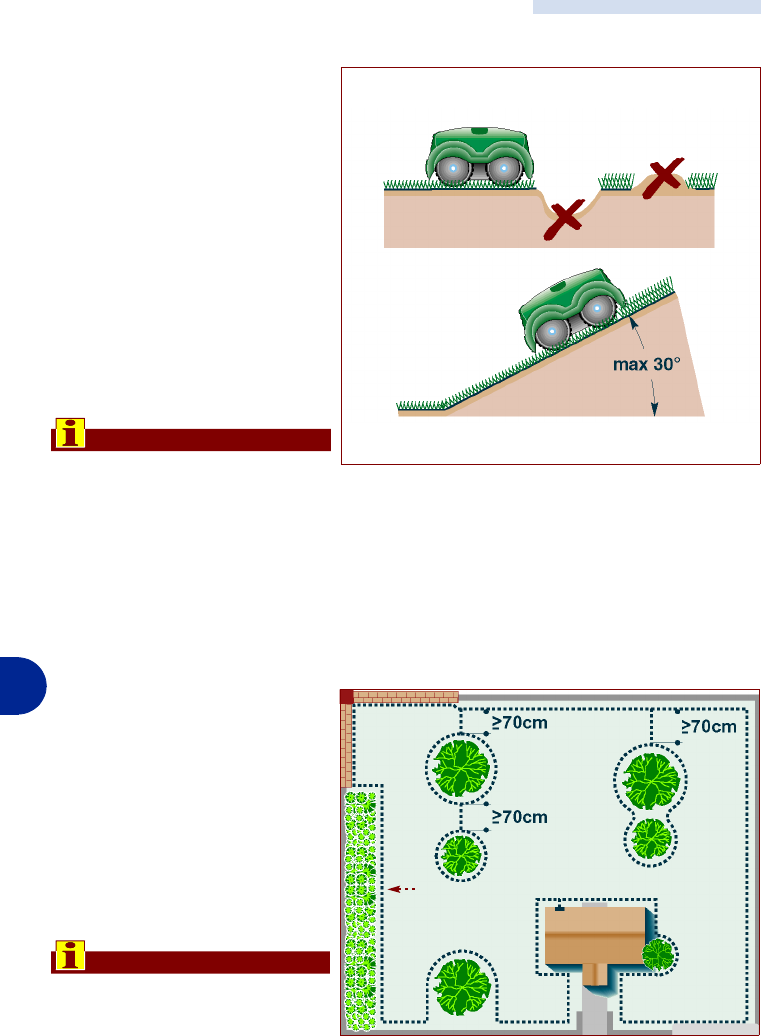
La superficie de prado que el robot
puede cortar depende de una serie
de factores.
–modelo del robot y tipo de baterías
instaladas
–características del área (perímetros
irregulares, superficie no uniforme,
fraccionamiento del área, etc.)
–caractéristicas del prado (tipo y altu-
ra del césped, humedad, etc.)
–condiciones de la cuchilla (con afilado
eficiente, sin residuos e incrustacio-
nes, etc)
El robot Ambrogio Line 100 se fabrica
en las versiones BASIC y DELUXE.
Versión BASIC: modelo básico que, bajo
pedido, se puede suministrar con tele-
mando.
El robot efectúa el corte y se para en las
proximidades del alambre perimétrico
tras agotar la carga de las baterías.
Versión DELUXE: modelo equipato con
telemando y sensor para detectar el
"prado cortado".
El robot efectúa el corte y se para en las
proximidaded del alambre perimétrico,
cuando el sensor detecta que el prado
ha sido completamente cortado.
Ambos modelos están provistos de un
sensor que, en caso de lluvia, los para
automáticamente.
Bajo pedido, los modelos pueden estar
provistos de transmisor potenciado, fil-
tro interferencias electromagnéticas y
caja protección alimentación.
MODALIDADES DE PETICIÓN DE ASISTENCIA
INFORMACIONES TÉCNICAS
DESCRIPCIÓN GENERAL DE LA MÁQUINA
IDM - 41501600200.tif
robot
robot
- 6 -
C141501600.fm
Manual de uso
E
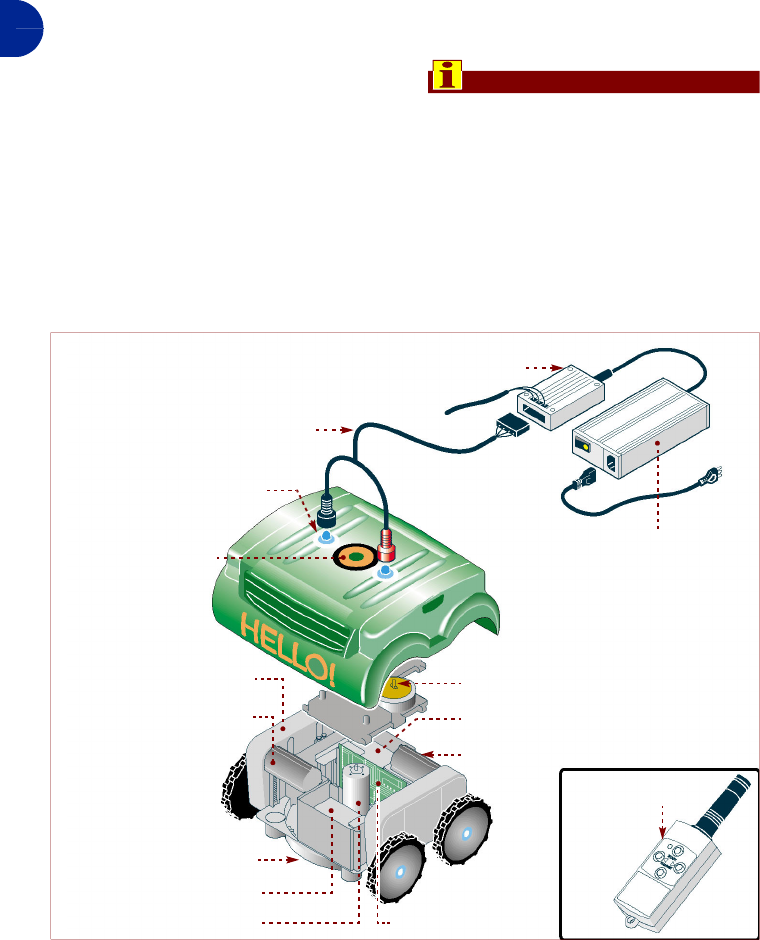
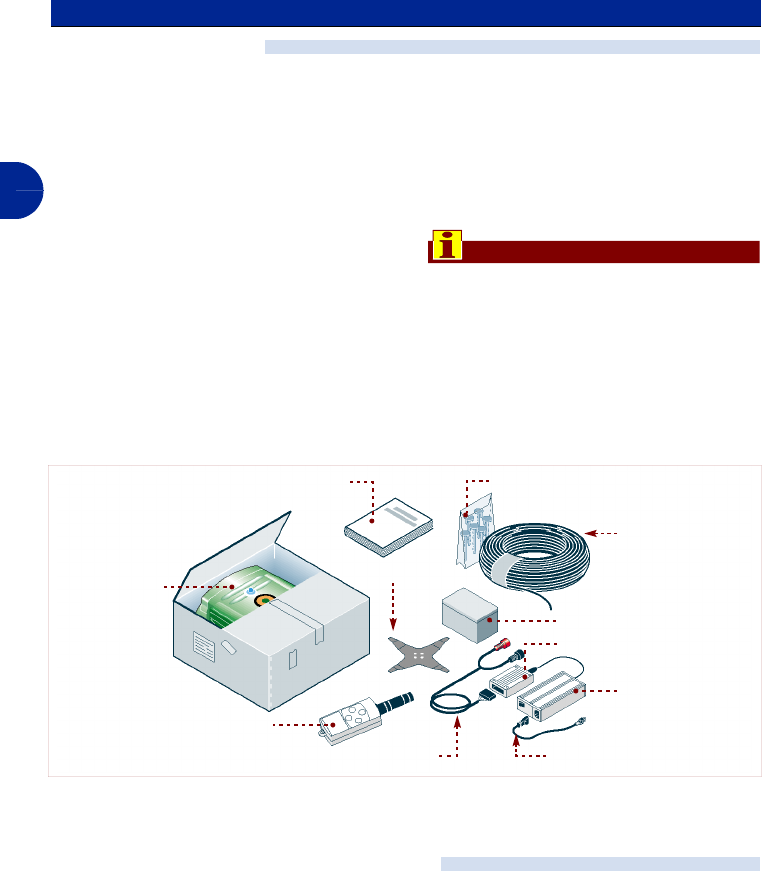
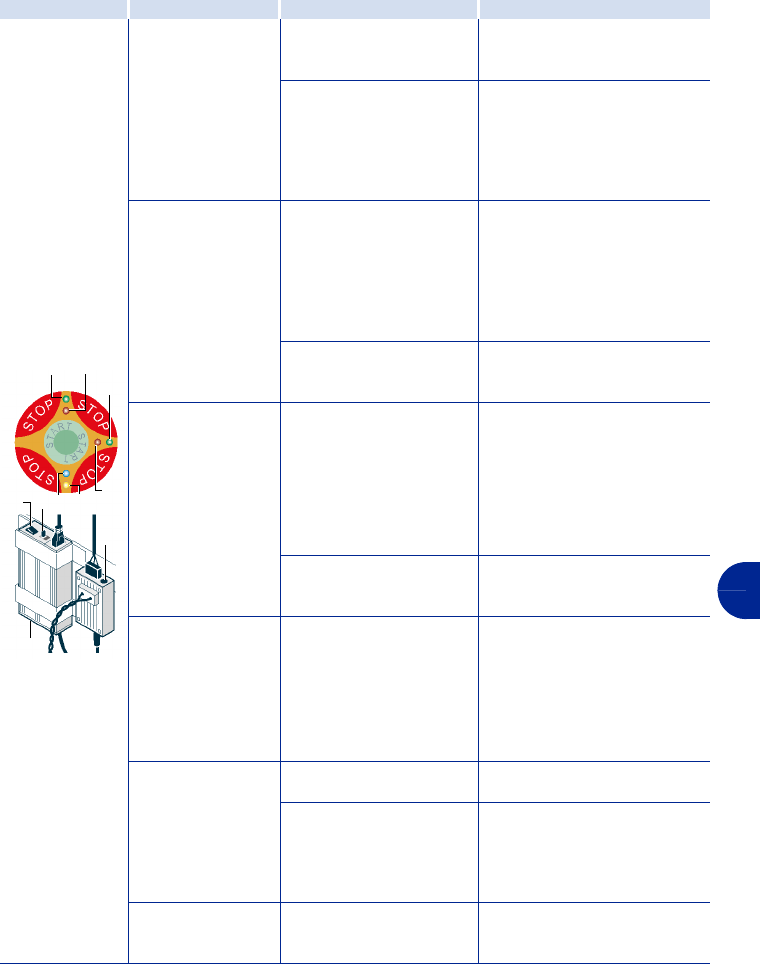
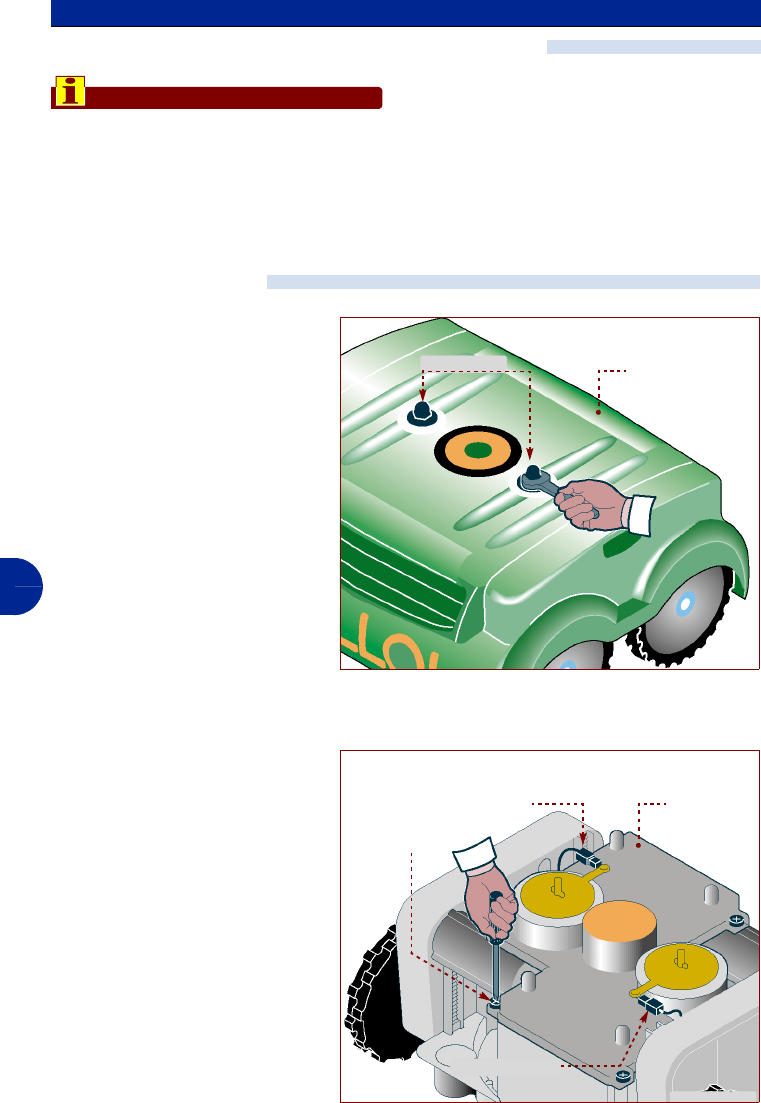
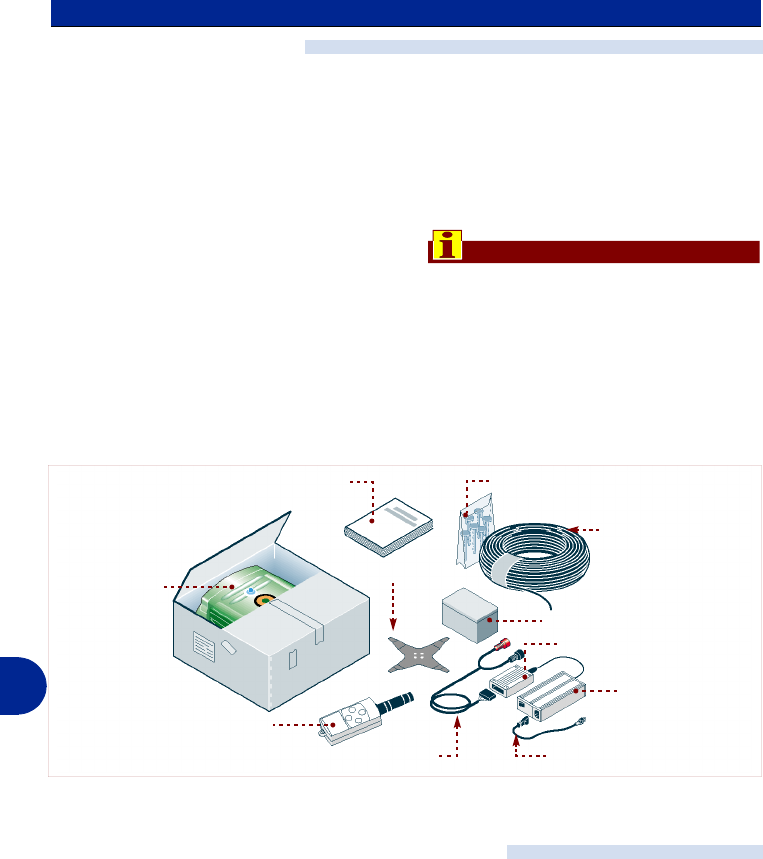
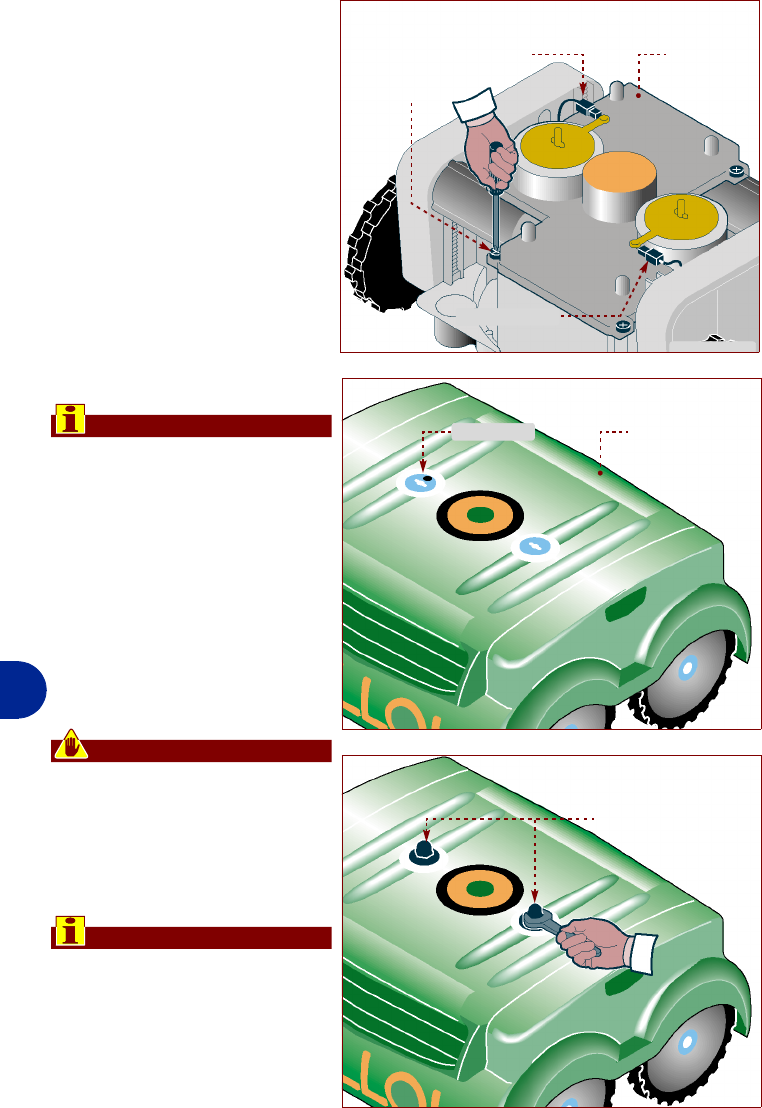
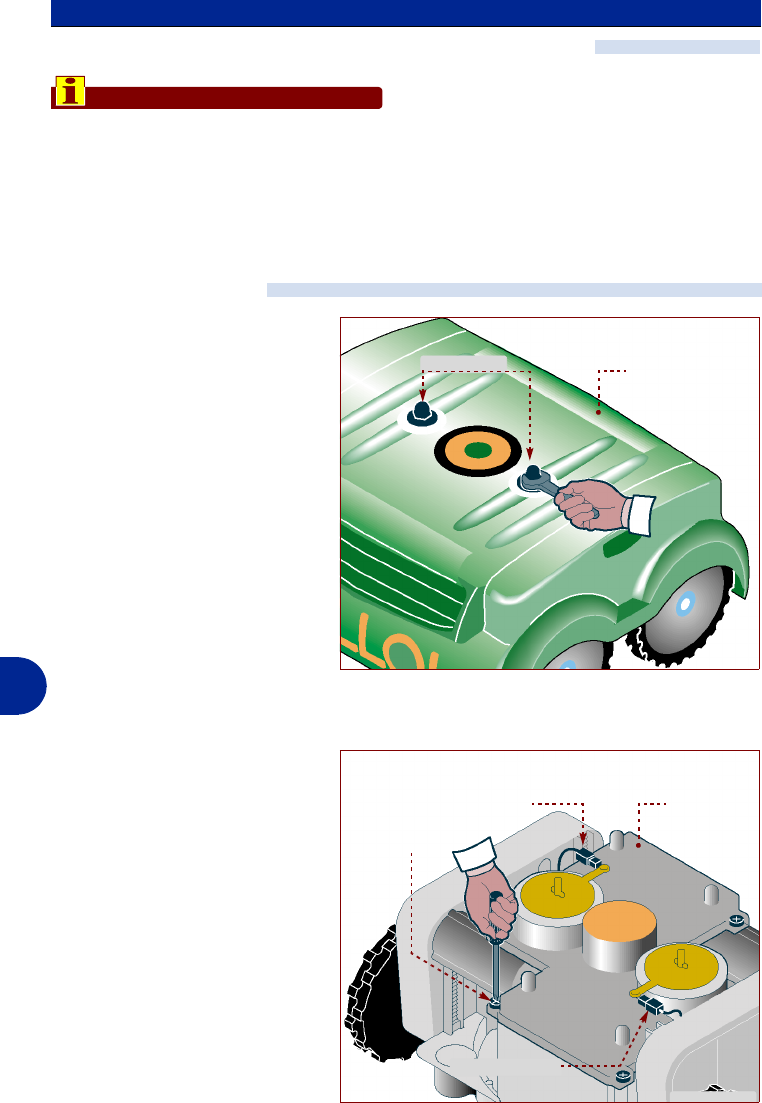
Órganos principales
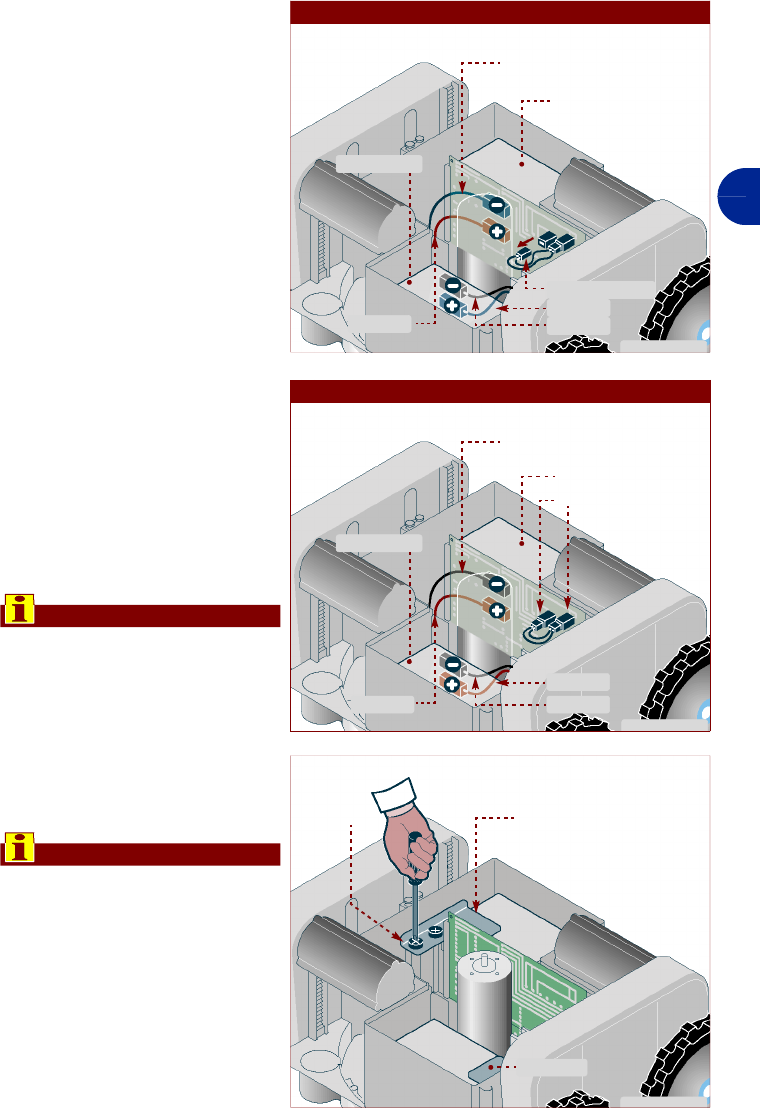
–Baterías de acumuladores(A): ali-
mentan los motores de la cuchilla y de
accionamiento ruedas.
El robot se suministra con baterías de
plomo, o bien con una o dos baterías
de litio que garantizan una vida útil
más larga.
–Enganche cargador batería(B): sirve
para conectar las baterías (A) en fase
de recarga.
–Tarjeta electrónica(C): controla las
funciones automáticas del robot.
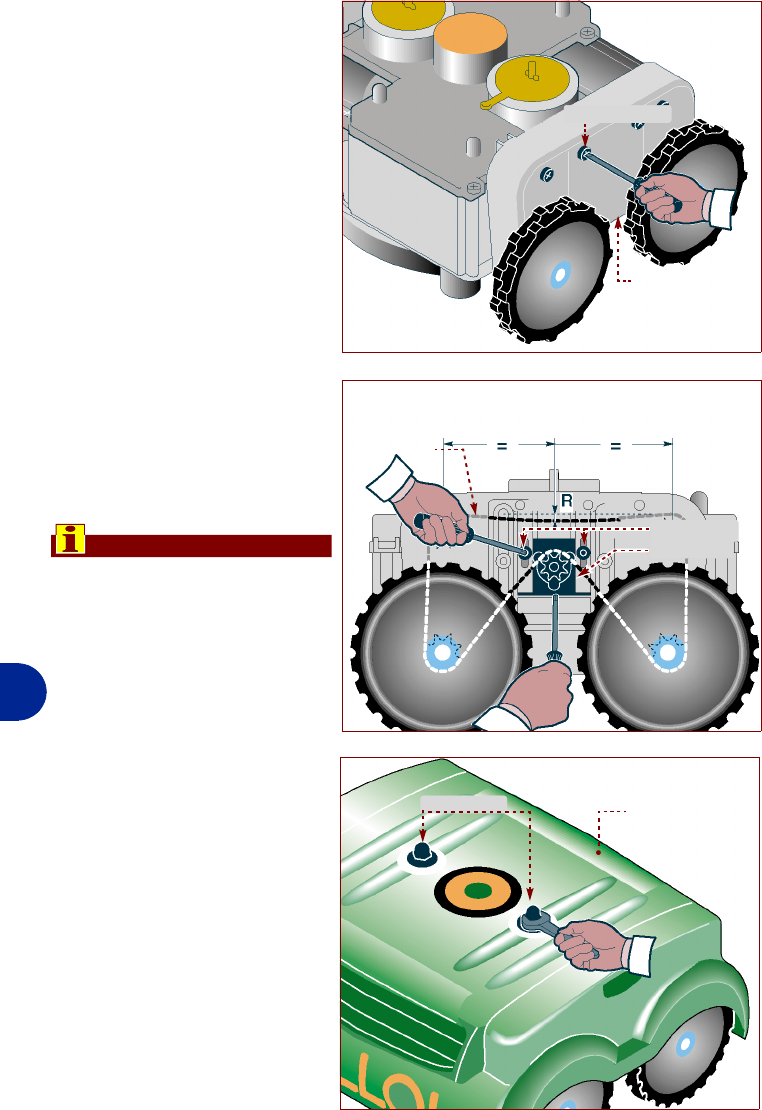
–Grupo transmisión(D): acciona las
ruedas derechas y izquierdas median-
te dos motores independientes.
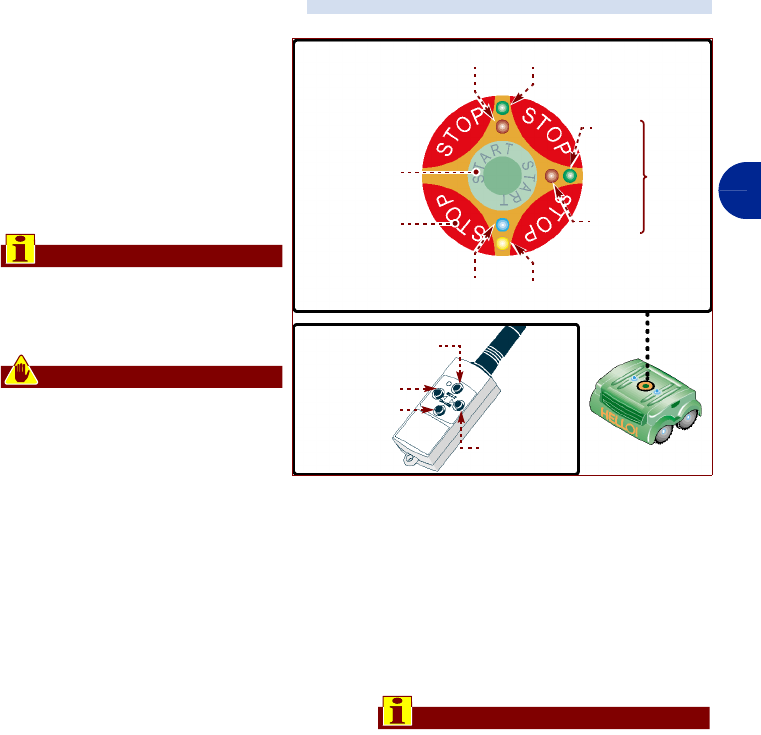
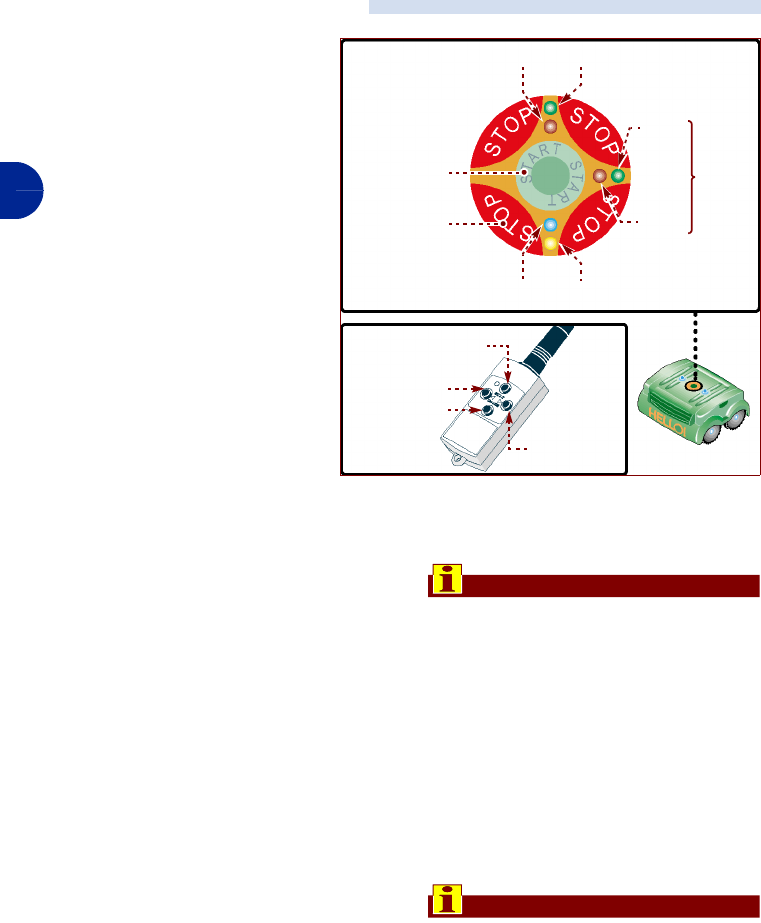
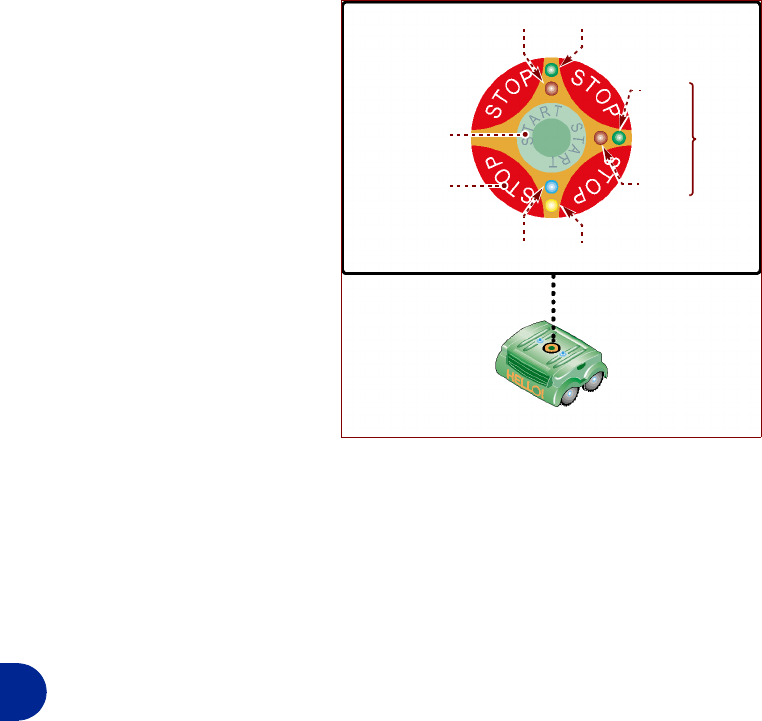
–Teclado de mandos(E): sirve para
programar y visualizar las modalida-
des de funcionamiento del robot.
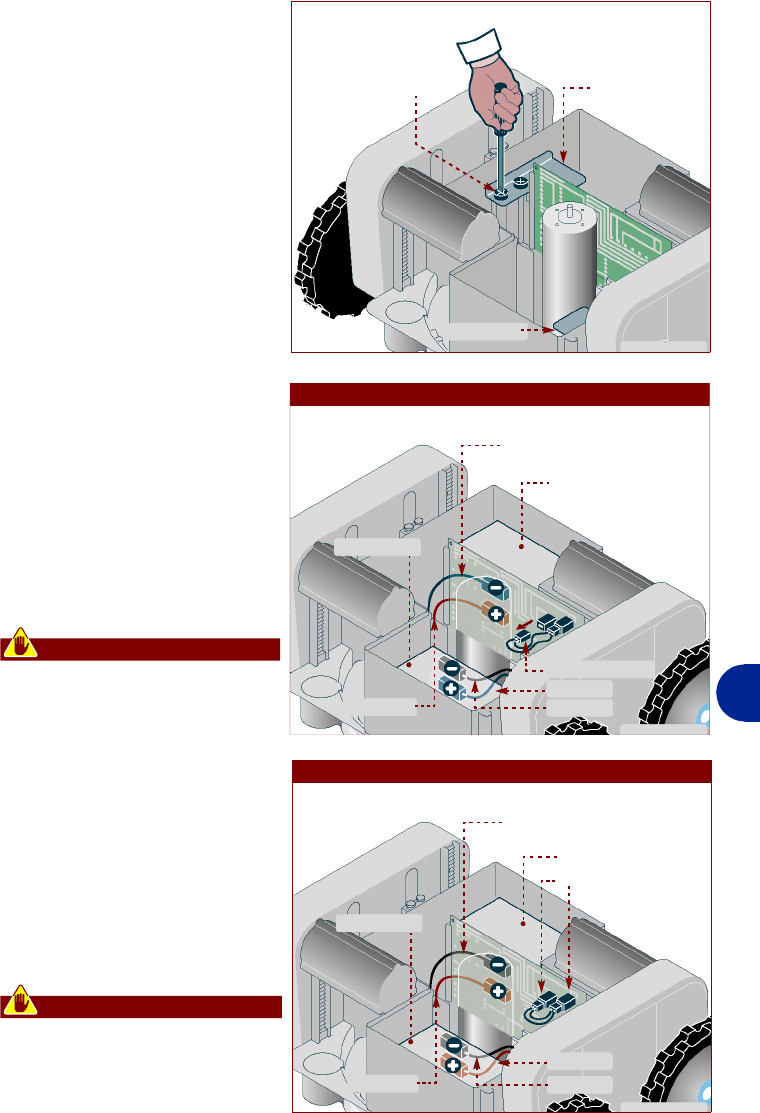
–Cuchilla corte(F): efectúa el corte del
prado.
–Motor eléctrico(G): acciona la cuchi-
lla de corte (F).
–Motor eléctrico(H): el primero accio-
na el grupo transmisión ruedas dere-
chas mientras el segundo el de las
ruedas izquierdas.
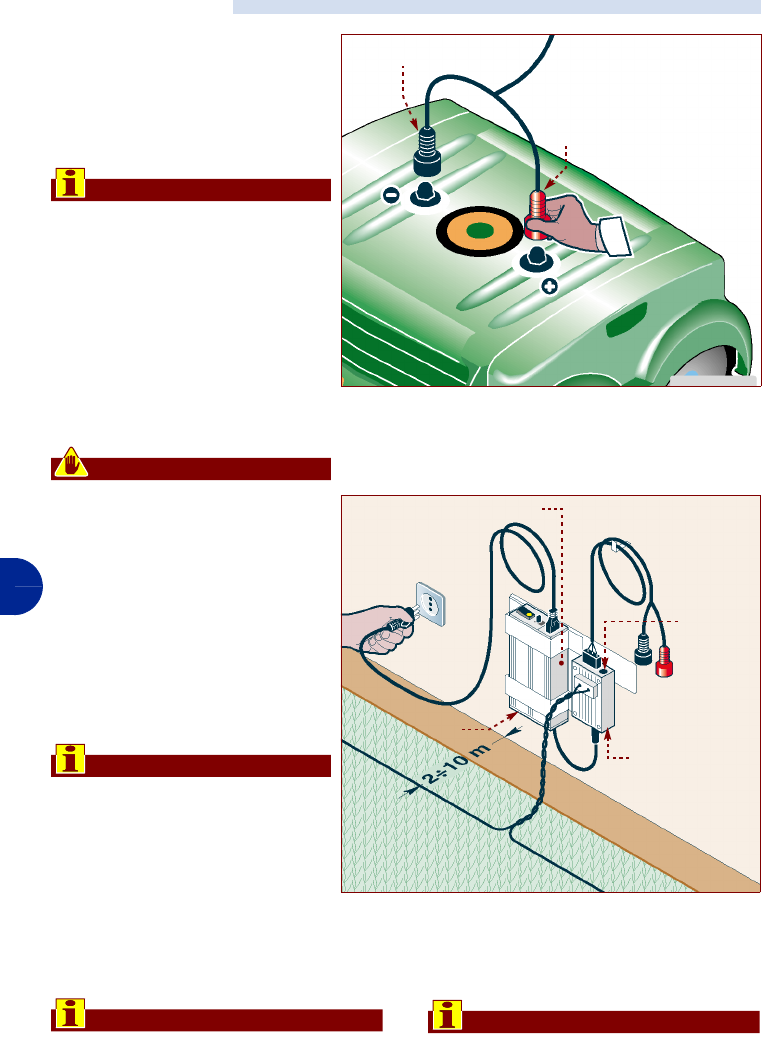
–Transmisor(L): transmite la señal al
alambre perimétrico.
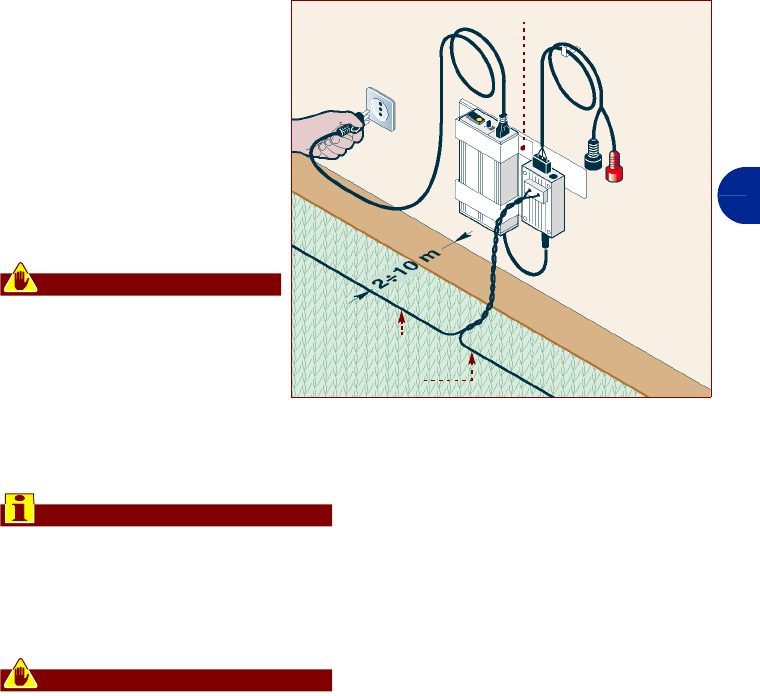
–Alimentador(M): alimenta, en baja
tensión, la corriente de las baterías.
Importante
El alimentador varía en base al tipo de
baterías instaladas (baterías de plomo
o de litio).
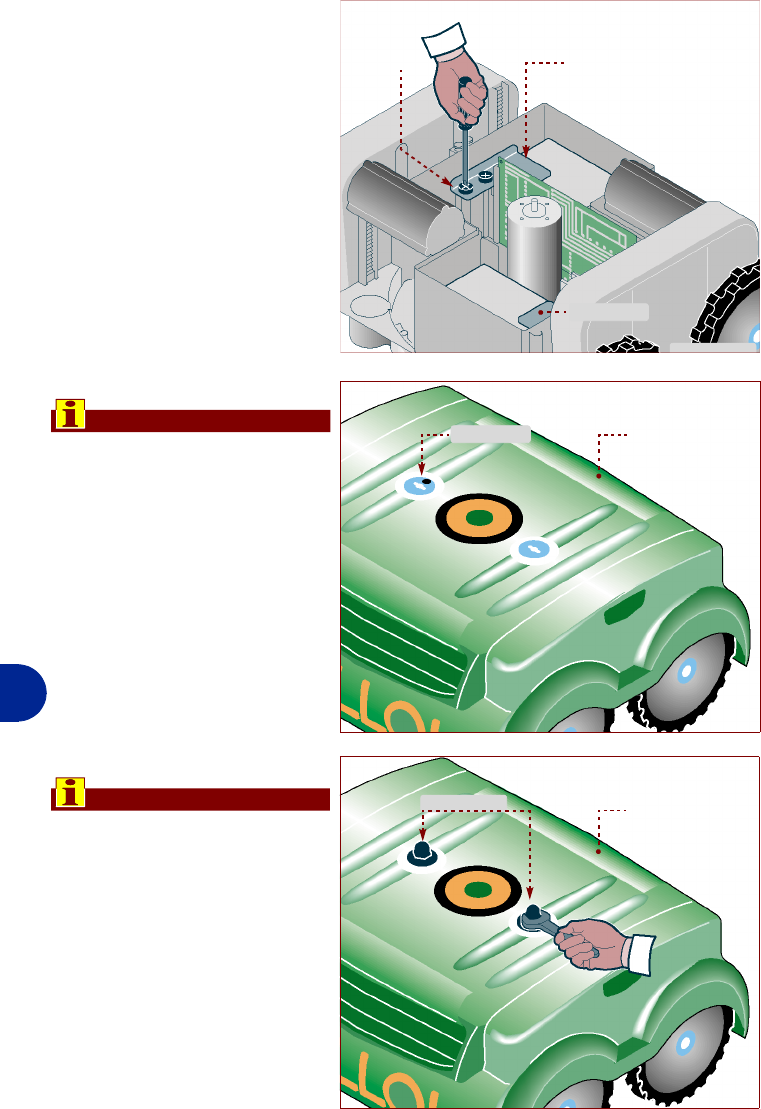
–Sensor choques(N): detecta el cho-
que del robot contra un obstáculo e
invierte su sentido de marcha.
–Telemando(P): sirve para controlar a
distancia las funciones del robot.
transmisor señal (L)
cable carga batería
enganche recarga batería (B)
teclado de mandos (E)
grupo transmisión (D)
motor eléctrico (H)
motor eléctrico (G)
cuchilla de corte (F)
baterías de acumuladores (A)
baterías de acumuladores (A)
motor eléctrico (H)
sensor choques (N)
telemando (P)
alimentador de corriente (M)
tarjeta electrónica (C)
IDM - 41501600300.tif
- 7 -
C141501600.fm
Manual de uso
E
DATOS TÉCNICOS
Descripción
Modelo
BASICDELUX
Cuchilla con 4 cortantes
(mm)
ø290ø290
Velocidad corte
(m/min)
2525
Altura corte
(mm)
20÷10020÷100
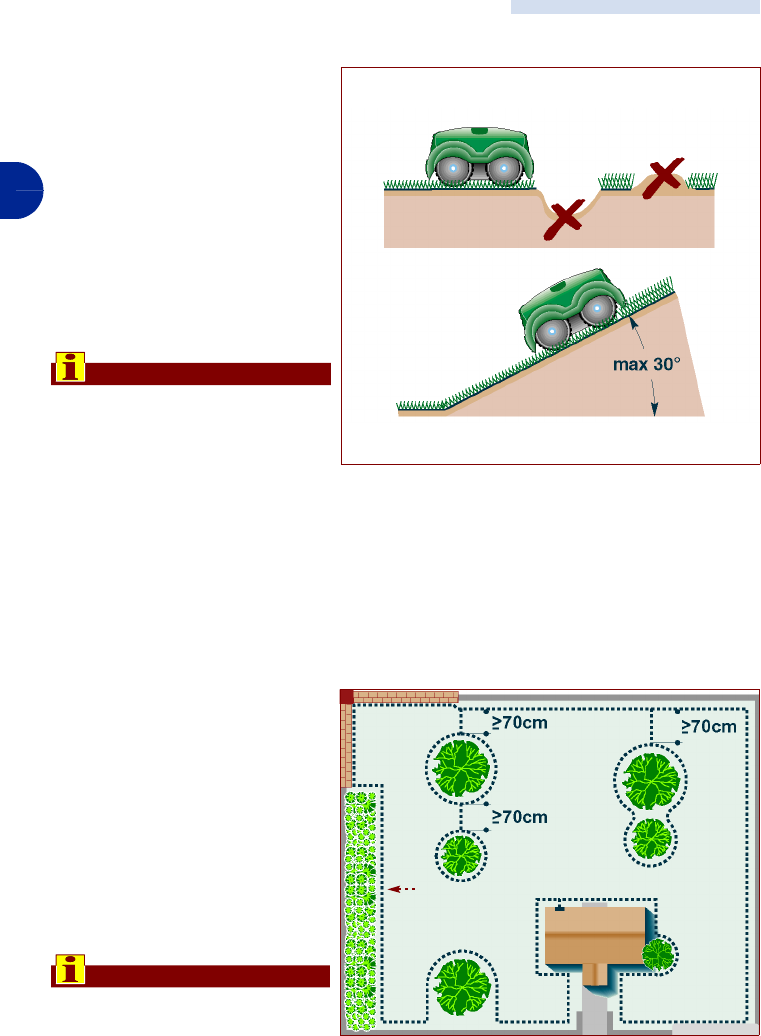
Pendiente máxima de la superficie a cortar30° (57%)30° (57%)
Identificatiegegevens van de fabrikant en de machine,
4
In- en uitpakken, 10
Installatie en aansluiting van de accu’s, 18
Installatie van de afrasteringsdraad, 15
Installatie van de voedings-/zendeenheid, 17
Installatie van het mes, 21
Installatie, machine, planning, 10
Instelling van de maaihoogte, 31
K
Kettingspanning, afstellen,
21
L
Langdurige stilstand en weer in gebruik nemen,
34
M
Maaihoogte, instellen,
31
Machine en Fabrikant, identificatie, 4
Machine, algemene beschrijving, 5
Mes, installatie, 21
Mes, vervanging, 43
O
Onderhoud, aanbevelingen voor het,
34
Onderhoudsvoorschriften, 34
Opladen van de accu’s, 30
Overzicht van de geprogrammeerde onderhoudster-
mijnen,
35
P
Planning van de installatie van de machine,
10
Programmeringsprocedure van de afstandsbedie-
ning,
29
R
Robot (van de ene plaats naar de andere), met de af-
standsbediening verplaatsen,
29
Robot (van de ene plaats naar de andere), met de
hand verplaatsen,
29
Robot zonder afrasteringsdraad, starten, 27
Robot, afdanken, 43
Robot, automatisch stoppen, 28
Robot, schoonmaken, 35
S
Storingen, lokaliseren,
37
T
Technische gegevens,
7
Tips voor het gebruik, 34
V
Veiligheid voor mens en milieu tijdens het afdanken,
9
Veiligheidssignalen, 9
Veiligheidsvoorschriften, 8
Verpakken en uitpakken, 10
Vervanging van onderdelen, aanbevelingen voor de, 40
Verzoeken om technische hulp indienen, 5
Voedings-/zendeenheid, installatie, 17
Voorbereiden en afzetten van het werkgebied, 12
Voorschriften m.b.t. het regelen en afstellen, 21
Voorschriften voor het vervangen van onderdelen, 40
W
Weer in gebruik nemen, langdurige stilstand,
34
Werkgebied, voorbereiden en afzetten, 12
INHOUDSOPGAVE
Het is verboden dit document geheel of gedeeltelijk te verveelvoudigen zonder de toestemming van de Constructeur. Het beleid van de constructeur is op voortdurende productverbetering gericht en hij behoudt zich
dus het recht voor deze documentatie te wijzigen zonder voorafgaande kennisgeving op voorwaarde dat dit geen gevaren inhoudt.
Libble takes abuse of its services very seriously. We're committed to dealing with such abuse according to the laws in your country of residence. When you submit a report, we'll investigate it and take the appropriate action. We'll get back to you only if we require additional details or have more information to share.
Product:
Forumrules
To achieve meaningful questions, we apply the following rules:
First, read the manual;
Check if your question has been asked previously;
Try to ask your question as clearly as possible;
Did you already try to solve the problem? Please mention this;
Is your problem solved by a visitor then let him/her know in this forum;
To give a response to a question or answer, do not use this form but click on the button 'reply to this question';
Your question will be posted here and emailed to our subscribers. Therefore, avoid filling in personal details.
Register
Register getting emails for Ambrogio Basic at:
new questions and answers
new manuals
You will receive an email to register for one or both of the options.
Get your user manual by e-mail
Enter your email address to receive the manual of Ambrogio Basic in the language / languages: English, German, Dutch, French, Italian, Spanish as an attachment in your email.
The manual is 6,45 mb in size.
You will receive the manual in your email within minutes. If you have not received an email, then probably have entered the wrong email address or your mailbox is too full. In addition, it may be that your ISP may have a maximum size for emails to receive.
If you have not received an email with the manual within fifteen minutes, it may be that you have a entered a wrong email address or that your ISP has set a maximum size to receive email that is smaller than the size of the manual.
The email address you have provided is not correct.
Please check the email address and correct it.
Your question is posted on this page
Would you like to receive an email when new answers and questions are posted? Please enter your email address.